| A single camera inspection system to
detect and localize obstacles on railways based on manifold kalman filtering
Fioretti Federica, Ruffaldi Emanuele & Avizzano Carlo Alberto
IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA) IEEE,2018  Cite Details... Cite Details... | Abstract:Rails right-of-way surveillance is important for
providing safe and smooth travel of trains under effects of
environmental or human-generated damages to the railway.
This work presents a Structure from Motion pipeline specifically
designed with the aim of supporting the monitoring
operations of the railway infrastructure, using a monocular
camera mounted on the train tractor. Within this work we
developed a dynamical reconstruction instrument based on
the mathematics of the projective geometry for handling the
problem of localization, by triangulation techniques of points, lines, whole objects and of other known elements. Exploiting
the a-priori knowledge of the scene structure (known track
gauge) and the camera intrinsic parameters it is possible to
reconstruct in metric dimension the trajectory of the train and
the position of the detected object. The approach proposed here
combines Computer Vision techniques to detect the significant
elements and to classify a set of features with Bayesian filtering.
Algorithms for this specific purposes have been developed in
order to identify the rail track geometry, and a line-based
approach has been adopted to assess the camera poses. Starting
from these first estimates, a manifold Unscented Kalman
Filter operates on the set of robustly matched features, fusing
heterogeneous cues about the camera orientation and using
RANSAC to find the best solution. Consequently, the detected
objects can be triangulated and localized. An analysis using
real captures is reported to prove the quality of the results
obtained.
Bibtex:
@inproceedings{fiorettietfa,
author = {Fioretti, Federica and Ruffaldi, Emanuele and Avizzano,Carlo Alberto},
booktitle = {IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA)},
city = {Turin},
country = {Italy},
month = {September},
publisher = {IEEE},
title = {A single camera inspection system to
detect and localize obstacles on railways based on manifold kalman filtering},
year = {2018}
}
| |
|
| Towards Skills Evaluation of elderly for Human-Robot Interaction
Filippeschi Alessandro, Peppoloni Lorenzo, Kostavelis Giannis, Gerlowska Justyna, Ruffaldi Emanuele, Giakoumis Dimitris, Tzovaras Dimitrios, Rejdak Konrad & Avizzano Carlo Alberto
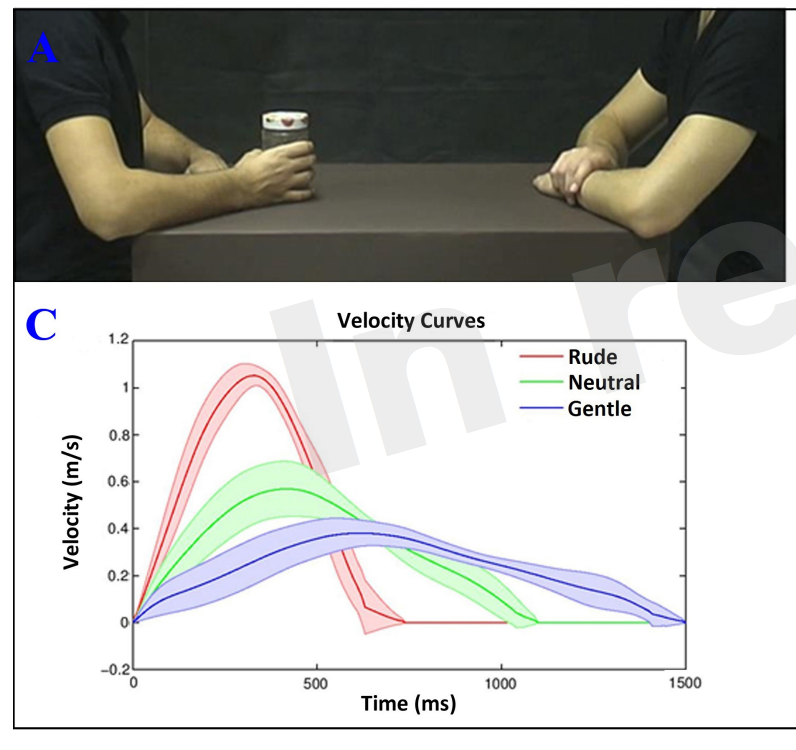
27TH IEEE INTERNATIONAL SYMPOSIUM ON ROBOT AND HUMAN INTERACTIVE COMMUNICATION (RO-MAN) IEEE,2018 Cite Details... | Abstract:For a proactive and user-centered robotic assistance and communication, an assistive robot must make decisions about the level of assistance to be provided. Therefore, the robot must be aware of the preferences and the capabilities of the elderly. At the same time, relying on a sensing setup which is totally embedded in the assistive robot would increase its usability. In the framework of the RAMCIP project, a novel skills evaluation methodology has been developed to make the robot aware of the user's perceptual, cognitive and motor skills. This paper presents such a methodology and its preliminary evaluation. Based on a task analysis of the activities for which the robot provides assistance, the user's skills are given a score which is updated at different time scales based on the source of information. Highly reliable information is gathered from caregivers at a low rate by means of a graphical interface hosted by the robot. This information refers to standard medical examinations. Based on the modules for motion tracking, object and activity recognition, specific actions of ADL are selected to update motor skills score at a higher rate, which is typically twice per day. The two sources of information are then fused in a Kalman filter. Preliminary results on the illustrative example of arm precision show that the robot's sensing and cognitive capabilities suffice to obtain a state-of-the-art evaluation of the arm precision skill.
Bibtex:
@inproceedings{filippeschiramcip,
author = {Filippeschi,Alessandro and Peppoloni,Lorenzo and Kostavelis,Ioannis and Gerlowska,Justyna and Ruffaldi,Emanuele and Giakoumis,Dimitris and Tzovaras,Dimitrios and Rejdak,Konrad and Avizzano,Carlo Alberto},
booktitle = {27TH IEEE INTERNATIONAL SYMPOSIUM ON ROBOT AND HUMAN INTERACTIVE COMMUNICATION (RO-MAN)},
city = {NanJin-Tai An},
country = {China},
keyword = {{project:RAMCIP}
month={August}},
publisher = {IEEE},
title = {Towards Skills Evaluation of elderly for Human-Robot Interaction},
year = {2018}
}
| |
|
| Exploiting Posit Arithmetic for Deep Neural Networks in Autonomous Driving Applications
Cococcioni Marco, Ruffaldi Emanuele & Saponara Sergio
International Conference of Electrical and Electronic Technologies for Automotive IEEE,2018 Cite Details... | Abstract:This paper discusses the introduction of an integrated Posit Processing Unit (PPU) as an alternative to Floating-point Processing Unit (FPU) for Deep Neural Networks (DNN) in automotive applications. Autonomous Driving tasks are increasingly depending on DNN. For example, the detection of obstacles by means of object classification needs to be performed in real-time without involving remote computing. To speed up the inference phase of DNN the CPUs on-board the vehicle should be equipped with co-processors, such as GPUs, which embed specific optimization for DNN tasks. In this work, we review an alternative arithmetic that could be used within the co-processor. We argue that a new representation for floating point numbers called Posit is particularly advantageous, allowing for a better trade-off between computation accuracy and implementation complexity. We conclude that implementing a PPU within the co-processor is a promising way to speed up the DNN inference phase.
Bibtex:
@inproceedings{automotive2018,
author = {Cococcioni, Marco and Ruffaldi, Emanuele and Saponara,Sergio},
booktitle = {International Conference of Electrical and Electronic Technologies for Automotive},
publisher = {IEEE},
title = {Exploiting Posit Arithmetic for Deep Neural Networks in Autonomous Driving Applications},
year = {2018}
}
| |
|
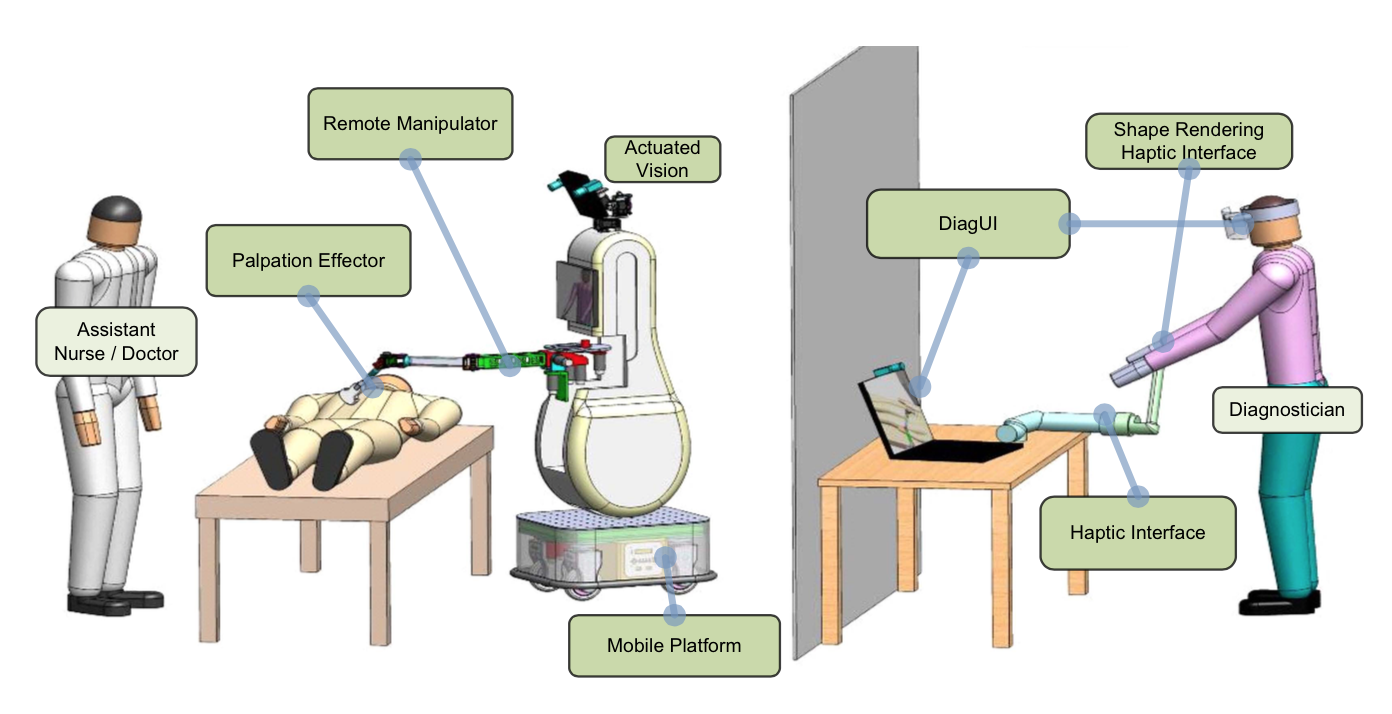
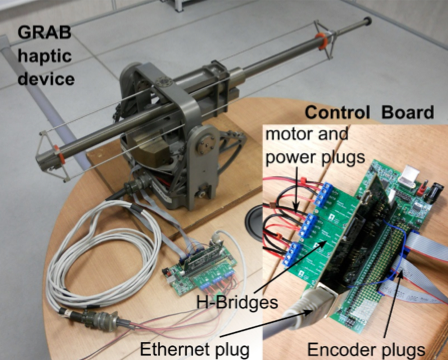
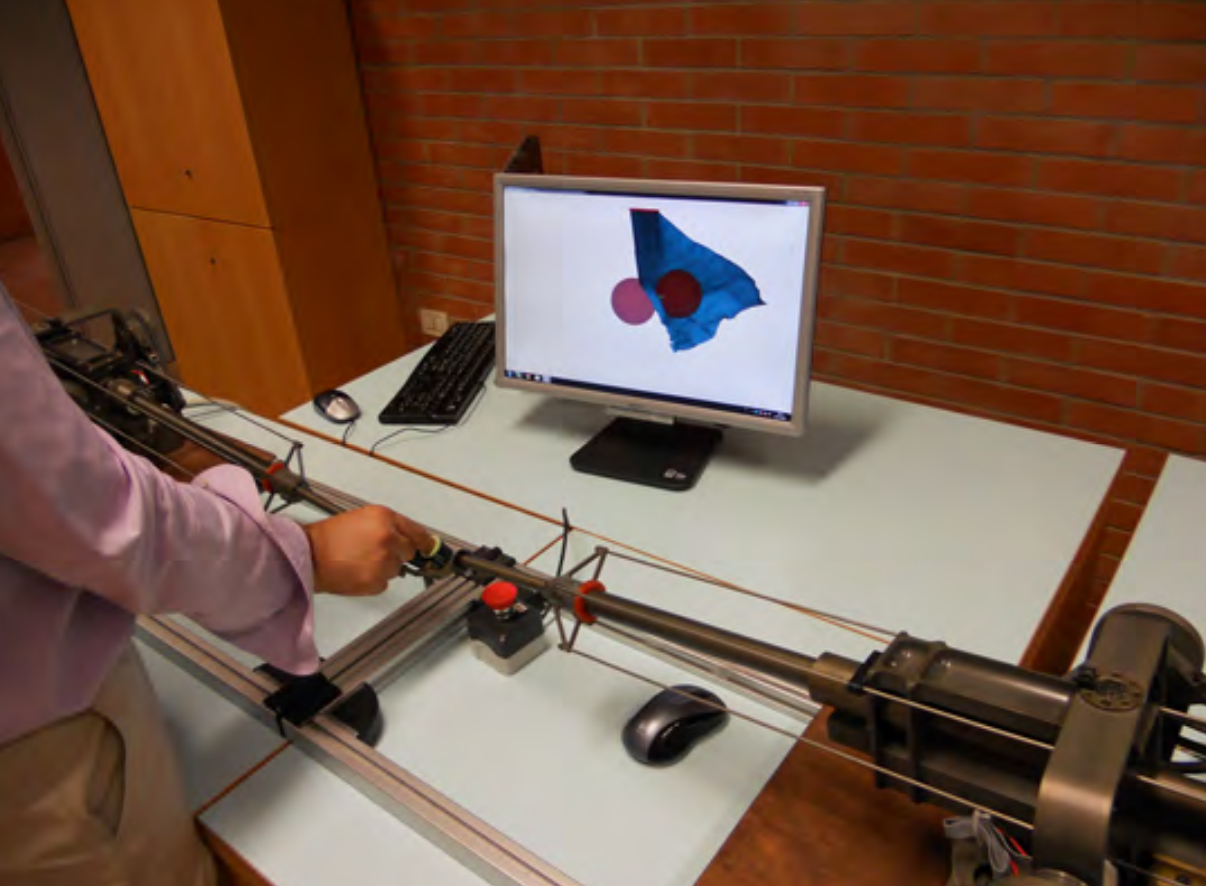
| Preliminary stiffness perception assessment for a palpation haptic interface
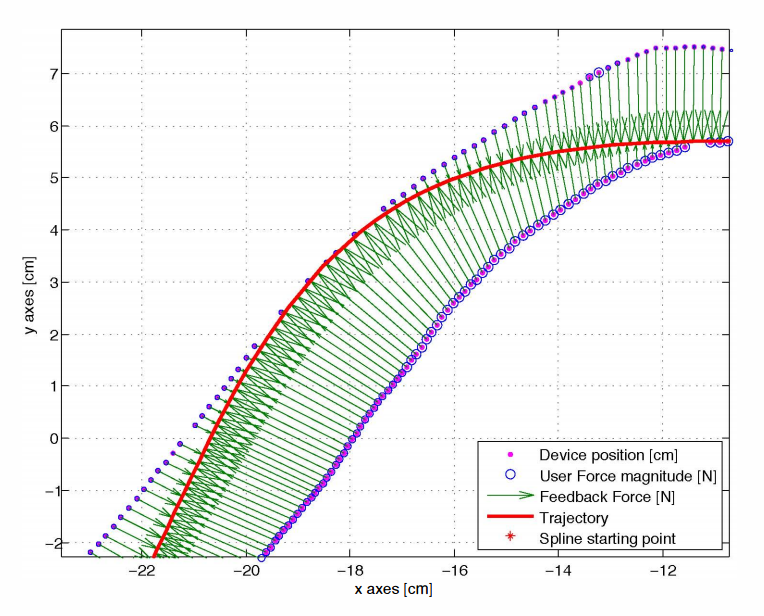
Filippeschi Alessandro, Jacinto Juan Manuel, Avizzano Carlo Alberto & Ruffaldi Emanuele
EuroHaptics Springer,2018 Cite Details... | Abstract:Palpation of patients is a common type of examination that is carried out by physicians for the early diagnosis of abnormalities in abdomens. In the ReMeDi project, a system for tele-palpation is developed. The system includes a diagnostician haptic interface which renders the abdomen of the remote patient. For the design of such a haptic interface, we investigate how the stiffness of a tissue layer is perceived by a human when mediated by a high-performance haptic interface acting in a simulated teleoperation loop. In our setup, the participants interacted with a haptic interface that displayed on their hands a force proportional to the stiffness of two layers that were compressed. The participants had to discriminate whether they were pushing on one or two layers of tissue. The stiffness of the first layer (k_1) was used as a baseline, whereas the stiffness of the second layer (k_2) varied. We investigated the just noticeable difference (JND) in the tissues stiffness that the participants could perceive. The stiffness JND was investigated by varying the thickness and the stiffness of the first layer. Moreover, we simulated the teleoperation loop by including a delay and damping in the interaction of the user with the virtual tissues. The preliminary results show that the estimated JND is higher with respect to direct interaction with real objects. Our study is in line with the finding that delay is detrimental to stiffness detection. Moreover, we found that higher baseline stiffness, as well as a thicker first tissue layer, help the stiffness discrimination. From this study, we hypothesize that enhancing the feedback to the doctors is crucial to help them making correct diagnoses.
doi:10.1007/978-3-319-93445-7_16 Bibtex:
@inproceedings{eh2018,
author = {Filippeschi, A. and Jacinto, J.M. and Avizzano, C.A. and Ruffaldi, E.},
booktitle = {EuroHaptics},
doi = {10.1007/978-3-319-93445-7_16},
howpresented = {poster},
iris = {no},
keyword = {haptics, stiffness, remedi, GRAB},
publisher = {Springer},
title = {Preliminary stiffness perception assessment for a palpation haptic interface},
year = {2018}
}
| |
|
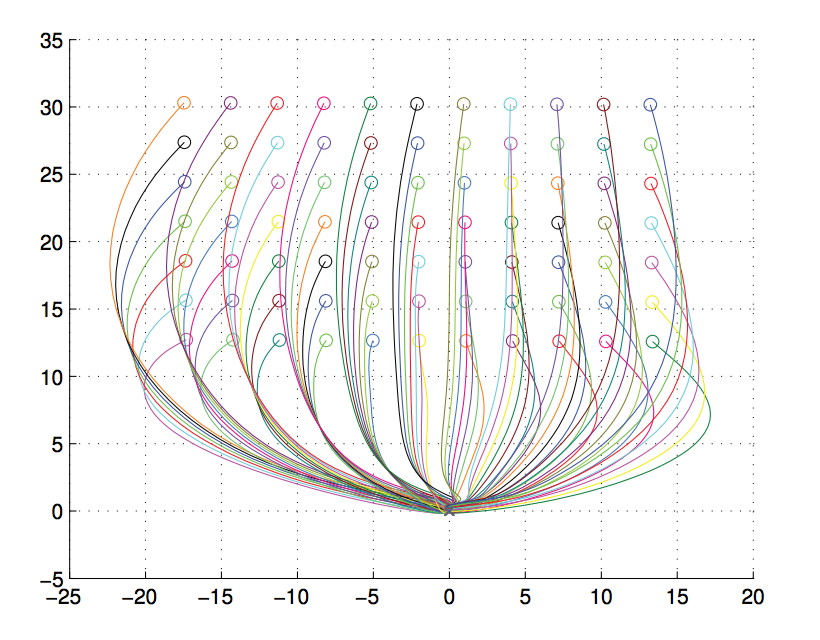
| Online Calibration Procedure for Motion Tracking with Wearable Sensors using Kalman Filtering
Filippeschi Alessandro, Ruffaldi Emanuele, Peppoloni Lorenzo & Avizzano Carlo Alberto
16th International Symposium on Advances in Robot Kinematics Springer,2018 Cite Details... | Abstract:Several methods have been developed to estimate human limbs poses through inertial measurement units (IMUs). Although a big effort has been dedicated to the selection of the sensor fusion algorithm, less attention has been paid to some aspects that may cause considerable estimation errors. This paper presents a novel method for human upper limb motion tracking that accounts for the motion of the IMUs with respect to the attached limb and a calibration procedure for the estimation of limbs lengths.
Three Unscented Kalman Filters are proposed to estimate joint angles, IMUs poses, and the limbs lengths based on the IMUs measurements.
We validate our method by means of an optical motion tracking system that we used to calculate wrists position. This approach shows to be able to estimate unknown link lengths, to update correctly IMUs position and to improve the wrists position estimation.
Bibtex:
@inproceedings{ark2018,
author = {Filippeschi, A. and Ruffaldi, E. and Peppoloni, L. and Avizzano, C.A.},
booktitle = {16th International Symposium on Advances in Robot Kinematics},
iris = {no},
keyword = {unscented kalman filtering, sensor fusion, kinematic chains},
publisher = {Springer},
title = {Online Calibration Procedure for Motion Tracking with Wearable Sensors using Kalman Filtering},
year = {2018}
}
| |
|
| VALUE: Large Scale
Voting-based Automatic Labeling for Urban Environments
Dabisias Giacomo, Ruffaldi Emanuele, Grimmett H. & Ondruska P.
ICRA IEEE,2018    Cite Details... Cite Details... | Abstract:This paper presents a simple and robust method for the automatic localisation of static 3D objects in large-scale urban environments. By exploiting the potential to merge a large volume of noisy but accurately localised 2D image data, we achieve superior performance in terms of both robustness and accuracy of the recovered 3D information. The method is based on a simple distributed voting schema which can be fully distributed and parallelised to scale to large-scale scenarios. To evaluate the method we collected city-scale data sets from New York City and San Francisco consisting of almost 400k images spanning the area of 40 km$^2$ and used it to accurately recover the 3D positions of traffic lights. We demonstrate a robust performance also show that the solution improves in quality over time as the amount of data increases.
Bibtex:
@inproceedings{ giacomoicra18, author = {Dabisias, G. and Ruffaldi, E. and Grimmett, H. and Ondruska, P.}, booktitle = {ICRA}, iris = {no}, keyword = {localization,triangulation,maps,vision,ai,deeplearning}, publisher = {IEEE}, title = {VALUE: Large Scale Voting-based Automatic Labeling for Urban Environments}, year = {2018} }
| |
|
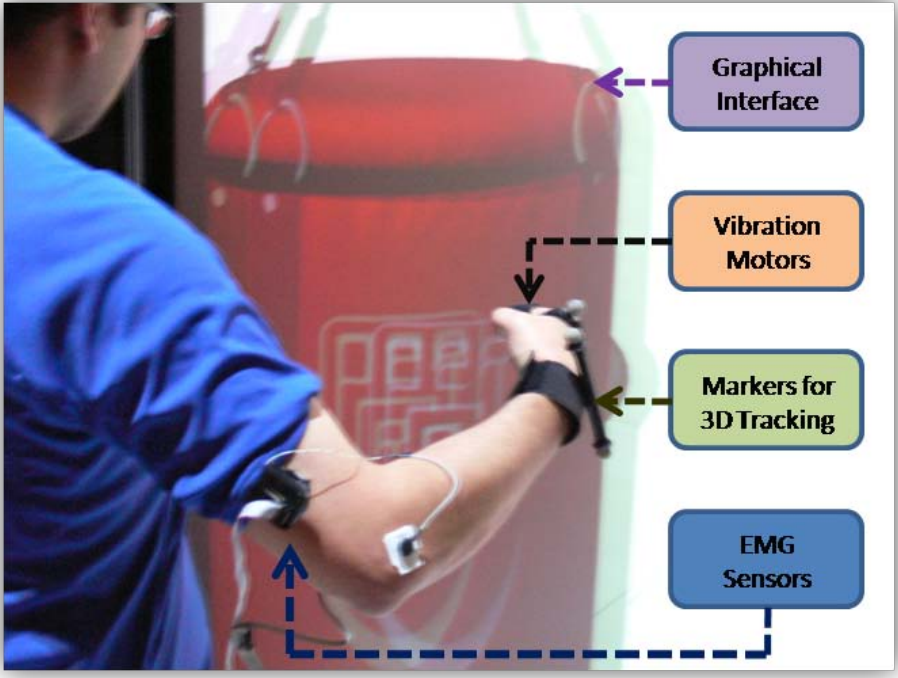
| Vibrotactile Feedback for Aiding Robot Kinesthetic Teaching of Manipulation Tasks
Ruffaldi Emanuele, Di Fava Alessandro, Loconsole C., Frisoli Antonio & Avizzano Carlo Alberto
RO-MAN (pp. 818-823). IEEE,2017 Cite Details... | Abstract:Kinesthetic teaching is a viable solution for pro- gramming robots in the execution of new tasks thanks to the human-mediated mapping between the task objectives and the robot joint space. Redundant designs and differences from human kinematics pose challenges in the efficient execution of the teaching task. In this work we employ vibrotactile feedback letting operators understand specific kinematic constraints such as reaching joint limits and singularities. The experimentation with a Baxter robot and a four-motor vibrotactile bracelet is reported showing the effectiveness of the proposed enhancement to the kinesthetic teaching task.
doi:10.1109/ROMAN.2017.8172397 Bibtex:
@inproceedings{ difavavibro, author = {Ruffaldi, E. and Di Fava, Alessandro and Loconsole, C. and Frisoli, A. and Avizzano, C. A.}, booktitle = {RO-MAN}, doi = {10.1109/ROMAN.2017.8172397}, iris = {yes}, issn = {1944-9437}, keyword = {project:TAUM}, pages = {818--823}, published = {14 December 2017}, publisher = {IEEE}, title = {Vibrotactile Feedback for Aiding Robot Kinesthetic Teaching of Manipulation Tasks}, video = {https://www.youtube.com/edit?o=U&video_id=q_j9_7iDcEM}, year = {2017} }
| |
|
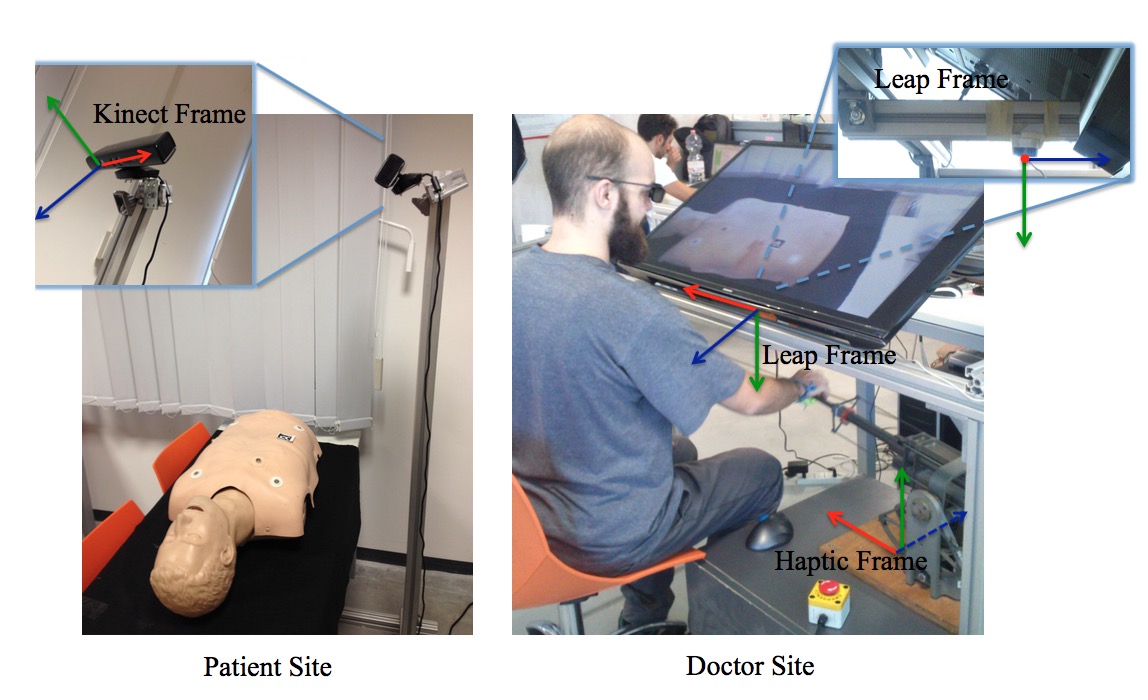
| Teleoperated multimodal robotic interface for telemedicine: a case study on remote auscultation
Falleni S., Filippeschi Alessandro, Ruffaldi Emanuele & Avizzano Carlo Alberto
RO-MAN (pp. 476-482). IEEE,2017 Cite Details... | Abstract:The remote examination is becoming more and more important as the population is aging and experts lack as ever before. We propose a novel system which is suitable for remote examination and in particular for remote auscultation. The system is located at two sites, at the patient site a robot holds a stethoscope which is placed on the patient while an RGB-D sensor streams a video of the scene. At the doctor site, the doctor interacts with a haptic interface that allows s/he to move the stethoscope while receiving haptic feedback when the stethoscope is in contact with the patient and looking at the remote scene on a screen. The doctor listens to the noise from the stethoscope thanks to a diaphragm and a headset where the audio stream from the patient site is played. After presenting this novel system, we show its effectiveness by means of experiments that involve auscultation-like tasks. We show the usability of the system to place the stethoscope, the usability to hear correctly the noise of the heart as well as the overall quality of the streamed audio signal.
doi:10.1109/ROMAN.2017.8172345 Bibtex:
@inproceedings{ falleni2017, author = {Falleni, S. and Filippeschi, A. and Ruffaldi, E. and Avizzano, C.A.}, booktitle = {RO-MAN}, doi = {10.1109/ROMAN.2017.8172345}, iris = {yes}, issn = {1944-9437}, keyword = {project:REMEDI}, pages = {476--482}, published = {14 December 2017}, publisher = {IEEE}, title = {Teleoperated multimodal robotic interface for telemedicine: a case study on remote auscultation}, year = {2017} }
| |
|
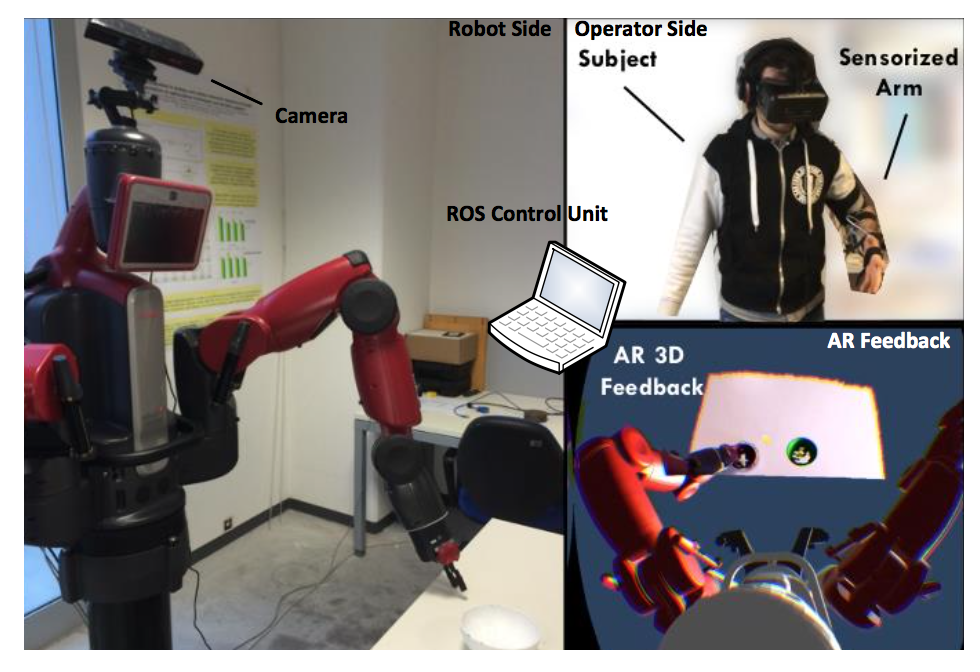
| An affordances based approach to assisted teleoperation
Graziano Alessandro, Ruffaldi Emanuele & Avizzano Carlo Alberto
22nd IEEE International Conference on
Emerging Technologies And Factory Automation (pp. 1-7). IEEE,2017 Cite Details... | Abstract:The introduction of tele-operated robots in scenarios in which human manipulation dexterity has not to be limited by the teleoperation system is one of the greatest challenges in the field of tele-control. In this paper we propose an approach for capturing and transferring human manupulative skills to a robotic manipulator that is able to supervise the teleoperation process by means of a proactive support that introduces elastic motion constraints around specific motion primitives. By exploiting not only information about motion, but also the relationships between the manipulator and the objects, in the form of affordances, the system is capable to assist the human operator in order to improve the teleoperation task performances. We test the algorithm with a Microsoft Kinect RGBD sensor that allows human body pose tracking and the semi-humanoid Baxter Robots by Rethink Robotics as teleoperated platform.
doi:10.1109/ETFA.2017.8247656 Bibtex:
@inproceedings{ ETFA2017aff, author = {Graziano, A. and Ruffaldi, E. and Avizzano, C.A.}, booktitle = {22nd IEEE International Conference on Emerging Technologies And Factory Automation}, doi = {10.1109/ETFA.2017.8247656}, issn = {1946-0759}, pages = {1--7}, published = {08, January 2018}, publisher = {IEEE}, title = {An affordances based approach to assisted teleoperation}, year = {2017} }
| |
|
| A Multi-Camera Framework for Visual Servoing of a Collaborative Robot in Industrial Environments
Di Stefano Erika, Ruffaldi Emanuele & Avizzano Carlo Alberto
22nd International Conference on
Emerging Technologies And Factory Automation (pp. 1-8). IEEE,2017 Cite Details... | Abstract:A great part of todays industries tends to invest
on automatic machines that can replace or collaborate with
humans in typical repetitive tasks. Despite their high motion
and positioning precision, most of these industrial robots
operate blindly, causing the working system to be poorly robust
to even slight changes of the working conditions. A solution
to such an issue might be to make the robots capable of
readjusting their actions according to a perceptual feedback, in
particular made of visual data. In this work we propose a multi-
camera framework for the visual servoing of a collaborative
robot that has to manipulate untextured industrial pieces. The
robot is supposed to recognize the object of interest and reach
it with its end-effector. We adopt a multi-camera approach
that overcomes typical issues related to single-camera schemes.
The system contains an object recognition module that extends
an already existing algorithm for 2D detection on images to
approximate 3D localization in space. A final probabilistic
recursive estimation process combines the measures provided
by the different sensors in order to improve the target pose
computation, considering all the possible uncertainty and dis-
turbance sources that may interfer, thus making the system
more robust and efficient.
doi:10.1109/ETFA.2017.8247645 Bibtex:
@inproceedings{ ETFA2017multi, author = {Di Stefano, E. and Ruffaldi, E. and Avizzano, C.A.}, booktitle = {22nd International Conference on Emerging Technologies And Factory Automation}, doi = {10.1109/ETFA.2017.8247645}, issn = {1946-0759}, pages = {1--8}, published = {08, January 2018}, publisher = {IEEE}, title = {A Multi-Camera Framework for Visual Servoing of a Collaborative Robot in Industrial Environments}, year = {2017} }
| |
|
| Estimation of Success in Collaborative Learning based on Multimodal Learning Analytics Features
Spikol Daniel, Cukurova Mutlu, Landolfi Lorenzo & Ruffaldi Emanuele
Proceedings of the 17th IEEE International Conference on Advanced Learning Technologies IEEE,2017 Cite Details... doi:10.1109/ICALT.2017.122 Bibtex:
@inproceedings{ Spikol:2017:ICALT, author = {Spikol, Daniel and Cukurova, Mutlu and Landolfi, Lorenzo and Ruffaldi, Emanuele}, booktitle = {Proceedings of the 17th IEEE International Conference on Advanced Learning Technologies}, doi = {10.1109/ICALT.2017.122}, keyword = {\textit{}multimodal learning analytics,PELARS}, location = {Bulgaria}, numpages = {5}, project = {pelars}, publisher = {IEEE}, title = {Estimation of Success in Collaborative Learning based on Multimodal Learning Analytics Features}, year = {2017} }
| |
|
| Current and Future Multimodal Learning Analytics Data Challenges
Spikol Daniel, Prieto LuisP., Rodr\'{\i}guez-triana M.J., Worsley Marcelo, Ochoa Xavier, Cukurova Mutlu, Vogel Bahtijar, Ruffaldi Emanuele & Ringtved UllaLunde
Proceedings of the Seventh International Learning Analytics \& Knowledge Conference (pp. 518-519). ACM,2017 Cite Details... doi:10.1145/3027385.3029437 Bibtex:
@inproceedings{ Spikol:2017:CFM:3027385.3029437, acmid = {3029437}, address = {New York, NY, USA}, author = {Spikol, Daniel and Prieto, Luis P. and Rodr\'{\i}guez-Triana, M. J. and Worsley, Marcelo and Ochoa, Xavier and Cukurova, Mutlu and Vogel, Bahtijar and Ruffaldi, Emanuele and Ringtved, Ulla Lunde}, booktitle = {Proceedings of the Seventh International Learning Analytics \& Knowledge Conference}, doi = {10.1145/3027385.3029437}, isbn = {978-1-4503-4870-6}, keyword = {challenges, datasets, multimodal learning analytics,PELARS}, location = {Vancouver, British Columbia, Canada}, numpages = {2}, pages = {518--519}, project = {pelars}, publisher = {ACM}, series = {LAK '17}, title = {Current and Future Multimodal Learning Analytics Data Challenges}, year = {2017} }
| |
|
| Using Multimodal Learning Analytics to Identify Aspects of Collaboration in Project-based Learning
Spikol Daniel, Ruffaldi Emanuele & Cukurova Mutlu
Proceedings of the 12th International Conference on Computer Supported Collaborative Learning, CSCL ,2017 Cite Details... Bibtex:
@inproceedings{ cscl17, author = {Spikol, Daniel and Ruffaldi, Emanuele and Cukurova, Mutlu}, booktitle = {Proceedings of the 12th International Conference on Computer Supported Collaborative Learning, CSCL}, keyword = {multimodal learning analytics,collaboration,PELARS}, project = {pelars}, title = {Using Multimodal Learning Analytics to Identify Aspects of Collaboration in Project-based Learning}, year = {2017} }
| |
|
| Multi-Contact Motion Retargeting from Human to Humanoid Robot
Di Fava Alessandro, Bouyarmane Karim, Chappellet Kevin, Ruffaldi Emanuele & Kheddar Abderrahmane
Proceedings of IEEE Humanoids (pp. 1081-1086). IEEE,2016 Cite Details... | Abstract:We propose a framework for real-time online and
offline retargeting of a human actor motion to a humanoid robot
motion involving multi-contact configuration changes between
the human/humanoid and their environments. The framework
is based on the specification within a multi-contact QP control
formulation of tracking tasks for a selected set of bodysegments/links, the ones either used for a manipulation task
from a fixed multi-contact stance or susceptible to be used as
contact supports or as locomotion supports on the environment
in the course of the execution of the motion. The framework
is applied in an online setting for simultaneous human-robot
motion tracking (in the case of no contact configuration change)
and in an offline setting for tracking the playback of the
recorded human motion that is pre-processed to extract from
it the sequence of contact change events as a necessary motion
information exploited by the tracking algorithm. We present
a real robot experiment with HRP-4 for the online setting
and a dynamics simulation experiment for the offline setting
to validate the proposed approach.
doi:10.1109/HUMANOIDS.2016.7803405 Bibtex:
@inproceedings{ fava16, author = {Di Fava, Alessandro and Bouyarmane, Karim and Chappellet, Kevin and Ruffaldi, Emanuele and Kheddar, Abderrahmane}, booktitle = {Proceedings of IEEE Humanoids}, city = {Cancun,Mexico}, doi = {10.1109/HUMANOIDS.2016.7803405}, keyword = {pdf:2016_C_DiFava,human motion,humanoids}, pages = {1081--1086}, publisher = {IEEE}, title = {Multi-Contact Motion Retargeting from Human to Humanoid Robot}, year = {2016} }
| |
|
| Investigating the Process of Emotion Recognition in Immersive and Non-Immersive Virtual Technological Setups
Faita Claudia, Vanni Federico, Tanca Camilla, Ruffaldi Emanuele, Carrozzino Marcello & Bergamasco Massimo
VRST '16 Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technolog (pp. 61-64). ACM,2016 Cite Details... | Abstract:This paper investigates the use of Immersive Virtual Environment (IVE) to evaluate the process of emotion recognition from faces (ERF). ERF has been mostly probed by using still photographs resembling universal expressions. However, this approach does not reflect the vividness of faces. Virtual Reality (VR) makes use of animated agents, trying to overcome this issue by reproducing the inherent dynamic of facial expressions, but outside a natural environment. We suggest that a setup using IVE technology simulating a real scene in combination with virtual agents (VAs) displaying dynamic facial expressions should improve the study of ERF. To support our claim we carried out an experiment in which two groups of subjects had to recognize VAs facial expression of universal and basic emotions in IVE and No-IVE condition. The goal was to evaluate the impact of the immersion in VE for ERF investigation. Results showed that the level of immersion in IVE does not interfere with the recognition task and a high level of accuracy in facial recognition suggests that IVE can be used to investigate the process of ERF.
doi:10.1145/2993369.2993395 Bibtex:
@inproceedings{ faita16, author = {Faita,Claudia and Vanni,Federico and Tanca,Camilla and Ruffaldi, Emanuele and Carrozzino, Marcello and Bergamasco, Massimo}, booktitle = {VRST '16 Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technolog}, city = {Munich,Germany}, date = {November 02 - 04}, doi = {10.1145/2993369.2993395}, isbn = {978-1-4503-4491-3}, keyword = {pdf:2016_C_Faita,VR}, pages = {61--64}, publisher = {ACM}, title = {Investigating the Process of Emotion Recognition in Immersive and Non-Immersive Virtual Technological Setups}, year = {2016} }
| |
|
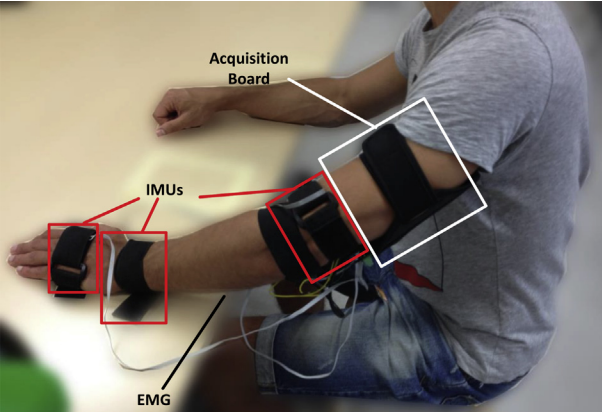
| Fusion of wearable sensors and mobile haptic robot for the assessment in upper limb rehabilitation
Saracino Lucia, Ruffaldi Emanuele, Graziano Alessandro & Avizzano Carlo Alberto
International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI) (pp. 66-71). IEEE,2016 Cite Details... | Abstract:Robot based rehabilitation is gaining traction also thanks to a generation of light and portable devices. This type of rehabilitation offers a high degree of flexibility in the design of interaction software and therapeutic process. There is therefore the need to perform assessment of the patient upper limb state during and after treatment. This paper presents the integration and fusion of a portable rehabilitation robot called MOTORE++ with a wearable tracking system for assessment purposes. The wearable system is based on inertial units together with EMG signals. The combination of the data from both the devices allows to partially evaluate the physiological condition of the user and the influence of the robot in the rehabilitation procedure. Results of an experimental campaign with patients is presented. This work opens also a spectrum of possible developments of adaptive behavior of the robot in the interaction with the patient.
doi:10.1109/MFI.2016.7849468 Bibtex:
@inproceedings{ motoremfi2016, author = {Saracino, Lucia Alessia and Ruffaldi, Emanuele and Graziano, Alessandro and Avizzano, Carlo Alberto}, booktitle = {International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI)}, doi = {10.1109/MFI.2016.7849468}, keyword = {Motore,pdf:2016_C_SaracinoMFI,project:ECHORD++}, pages = {66--71}, publisher = {IEEE}, title = {Fusion of wearable sensors and mobile haptic robot for the assessment in upper limb rehabilitation}, year = {2016} }
| |
|
| MOTORE++ A Portable Haptic Device for Domestic Rehabilitation
Saracino Lucia, Avizzano Carlo Alberto, Ruffaldi Emanuele, Cappiello Giovanni, Curto Zoran & Scoglio Andrea
42nd Annual Conference of IEEE Industrial Electronics Society (IECON) (pp. 728-734). IEEE,2016 Cite Details... | Abstract:This paper presents the MOTORE++ system, a Portable, mobile haptic interface with the unique feature of using its wheels to deploy rehabilitation exercises to users. MOTORE++ is a battery powered device, with hot swap batteries, capable to run autonomously for almost an hour. MOTORS++ is a technology shift enhancement improvement over the previous version. Its new electronic architecture allows several communication protocols (RS232, WiFi, Bluetooth) that provide link stability in all running scenarios. The device also implements a cutting edge computing architecture and a novel position sensor jointly developed with Anototo deliver precise sensor fusion and stability to the localization and force generation algorithms. In the present papers we will describe the relevant new features of the device, and we will review the major innovation with respect to the existing mobile haptic interfaces.
doi:10.1109/IECON.2016.7793115 Bibtex:
@inproceedings{ motoreiecon2016, author = {Saracino,Lucia and Avizzano,Carlo Alberto and Ruffaldi,Emanuele and Cappiello,Giovanni and Curto,Zoran and Scoglio,Andrea}, booktitle = {42nd Annual Conference of IEEE Industrial Electronics Society (IECON)}, doi = {10.1109/IECON.2016.7793115}, keyword = {Motore,pdf:2016_C_SaracinoIECON,motore,project:ECHORD++,ReMeDi}, pages = {728--734}, publisher = {IEEE}, title = {MOTORE++ A Portable Haptic Device for Domestic Rehabilitation}, year = {2016} }
| |
|
| Automatic Visual Based Assessment of the Attitude of a Train Pantograph
Di Stefano Erika, Ruffaldi Emanuele & Avizzano Carlo Alberto
International Smart Cities Conference (ISC2) IEEE,2016 Cite Details... | Abstract:In this paper we propose an automatic visual based technique, integrated in a wayside monitoring system for train inspection, that allows to assess the attitude of the metal bow of a pantograph by combining a colour image captured by an RGB digital camera and a point cloud built from a range sensor scan. An efficient and fast template-matching procedure allows to detect the pantograph in the scene and associate a matching attitude, searching for the most similar model present in a database. The record of templates belonging to the database exploits a virtual rendering environment that allows to optimize the training stage in terms of computational load and time. During actual inspection the RGB image and point cloud of the pantograph are opportunely processed and aligned to the same reference frame. After the preliminary template-matching step, the point cloud is augmented with the virtual model of the matched template and the attitude angular values are refined by applying the iterative closest point (ICP) algorithm between the real object and the virtual one, with the aim of reducing eventual residual errors.
doi:10.1109/ISC2.2016.7580747 Bibtex:
@inproceedings{ erika2016, author = {Di Stefano, Erika and Ruffaldi, Emanuele and Avizzano, Carlo Alberto}, booktitle = {International Smart Cities Conference (ISC2)}, doi = {10.1109/ISC2.2016.7580747}, keyword = {pdf:2016_C_DiStefano,project:Trenitalia}, publisher = {IEEE}, title = {Automatic Visual Based Assessment of the Attitude of a Train Pantograph}, year = {2016} }
| |
|
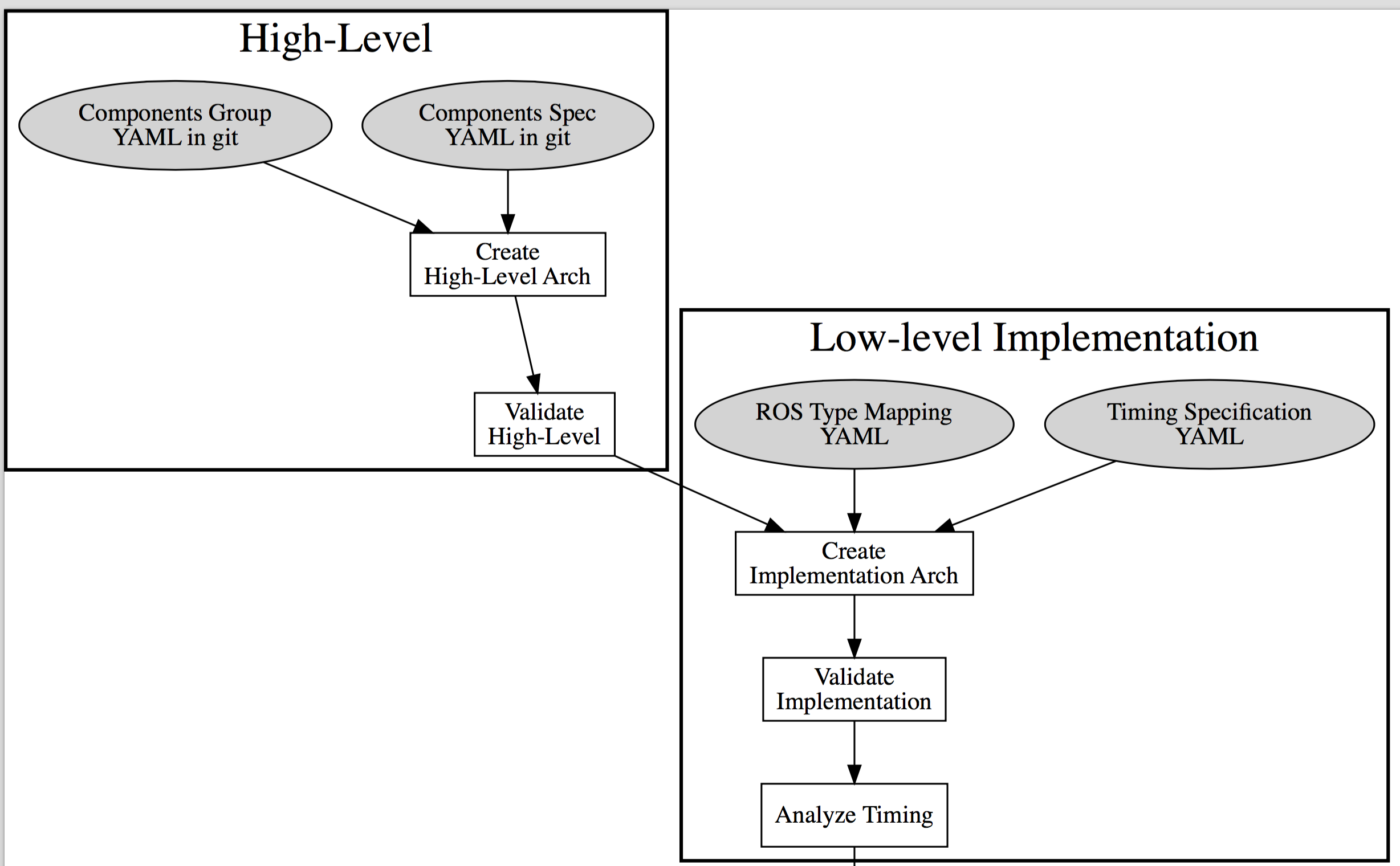
| ArchGenTool: a System-Independent Collaborative Tool for Robotic Architecture Design
Ruffaldi Emanuele, Kostavelis Giannis, Giakoumis Dimitris & Tzovaras Dimitrios
Proc. of 21st International Conference on Methods and Models in Automation and Robotics IEEE,2016 Cite Details... | Abstract:Complex robotic architectures require a collaborative effort in design and adherence to the design in the implementation phse. ArchGentTool is a collaborative architecture generation tool which supports the design of the robotic architecture in a multi-level fashion. It comprises high-level conceptual analysis of the system to be designed, as well as low-level implementation breakdown of its functional components, acting complementary to the ROS framework. The tool facilitates reusability and expandability of the architecture to any robotic system, as it can be adapted to different specifications. A case study with the RAMCIP service robot is presented
doi:10.1109/MMAR.2016.7575079 Bibtex:
@inproceedings{ archgen16, author = {Ruffaldi, Emanuele and Kostavelis, Giannis and Giakoumis, Dimitris and Tzovaras, Dimitrios}, booktitle = {Proc. of 21st International Conference on Methods and Models in Automation and Robotics}, doi = {10.1109/MMAR.2016.7575079}, keyword = {project:RAMCIP,pdf:2016_C_RuffaldiArchGen}, publisher = {IEEE}, title = {ArchGenTool: a System-Independent Collaborative Tool for Robotic Architecture Design}, year = {2016} }
| |
|
| CoCo - A framework for multicore visuo-haptics in mixed reality
Ruffaldi Emanuele & Brizzi Filippo
SALENTO AVR, 3rd International Conference on Augmented Reality, Virtual Reality and Computer Graphics (pp. 339-357). Springer,2016 Cite Details... | Abstract:Mixed Reality applications involve the integration of RGB-D streams with virtual entities potentially extended with force feedback. Increasing complexity of the applications pushes the limits of traditional computing structures, not keeping up with the increased computing power of multicore platform. This paper presents the CoCo framework, a component based, multicore system designed for tackling the challenges of visuo-haptics in mixed reality environment, with structural reconfiguration. Special care has been also given to the management of transformation between reference frames for easing registration, calibration and integration of robotic systems. The framework is described together with a description of two relevant case studies.
doi:10.1007/978-3-319-40621-3_24 Bibtex:
@inproceedings{ avrcoco2016, author = {Ruffaldi, Emanuele and Brizzi, Filippo}, booktitle = {SALENTO AVR, 3rd International Conference on Augmented Reality, Virtual Reality and Computer Graphics}, booktitle2 = {Augmented Reality, Virtual Reality, and Computer Graphics,AVR 2016, Part I, LNCS 9768}, chapter = {24}, doi = {10.1007/978-3-319-40621-3_24}, editor = {L.T. De Paolis and A. Mongelli (Eds.)}, howpresented = {oral}, isbn = {978-3-319-40620-6}, keyword = {AR,pdf:2016_C_RuffaldiAVRCOCO,CoCo,ReMeDi,TAUM}, pages = {339--357}, publisher = {Springer}, title = {CoCo - A framework for multicore visuo-haptics in mixed reality}, year = {2016} }
| |
|
| Third point of view Augmented Reality for robot intentions visualization
Ruffaldi Emanuele, Brizzi Filippo, Bacinelli Sandro & Tecchia Franco
SALENTO AVR, 3rd International Conference on Augmented Reality, Virtual Reality and Computer Graphics (pp. 471-478). Springer,2016 Cite Details... | Abstract:Lightweight, head-up displays integrated in industrial hel- mets allow to provide contextual information for industrial scenarios such as in maintenance. Moving from single display and single camera solu- tions to stereo perception and display opens new interaction possibilities. In particular this paper addresses the case of information sharing by a Baxter robot displayed to the user overlooking at the real scene. System design and interaction ideas are being presented.
doi:10.1007/978-3-319-40621-3_35 Bibtex:
@inproceedings{ avrtaum2016, author = {Ruffaldi, Emanuele and Brizzi, Filippo and Bacinelli, Sandro and Tecchia, Franco}, booktitle = {SALENTO AVR, 3rd International Conference on Augmented Reality, Virtual Reality and Computer Graphics}, booktitle2 = {Augmented Reality, Virtual Reality, and Computer Graphics,AVR 2016, Part I, LNCS 9768}, chapter = {35}, doi = {10.1007/978-3-319-40621-3_35}, editor = {L.T. De Paolis and A. Mongelli (Eds.)}, howpresented = {poster}, isbn = {978-3-319-40620-6}, keyword = {AR,pdf:2016_C_RuffaldiAVRTAUM,CoCo,TAUM}, pages = {471--478}, publisher = {Springer}, title = {Third point of view Augmented Reality for robot intentions visualization}, year = {2016} }
| |
|
| A wireless haptic data suit for controlling humanoid robots
Graziano Alessandro, Tripicchio Paolo, Ruffaldi Emanuele & Avizzano Carlo Alberto
47th International Symposium on Robotics (ISR) (pp. 1-8). VDE Verlag GmbH,2016 Cite Details... | Abstract:In this paper we present a novel wearable suit for haptic feedback capabilities at user's hands combined with upper body motion tracking. In the work we present both the system design and the algorithms used for motion tracking and haptic rendering. The overall system was applied to the co-located tele-operation of the Baxter research robot to perform manipulative tasks usually carried out by human personnel in the industry.
Bibtex:
@inproceedings{ isr2016, author = {Graziano, Alessandro and Tripicchio, Paolo and Ruffaldi, Emanuele and Avizzano, Carlo Alberto}, booktitle = {47th International Symposium on Robotics (ISR)}, city = {Munich}, howpresented = {oral}, ieeexplore = {http://ieeexplore.ieee.org/document/7559136/}, isbn = {978-380074231-8}, keyword = {TAUM,Baxter,motion,haptics,pdf:2016_C_GrazianoISR}, pages = {1--8}, publisher = {VDE Verlag GmbH}, title = {A wireless haptic data suit for controlling humanoid robots}, year = {2016} }
| |
|
| Data collection and processing for a multimodal Learning Analytic System
Ruffaldi Emanuele, Dabisias Giacomo, Landolfi Lorenzo & Spikol Daniel
IEEE SAI Conference, London (pp. 858-863). IEEE,2016 Cite Details... | Abstract:Learning Analytic (LA) systems are aimed at supporting teachers in understanding the learning process by analyzing the information and the interaction of students with computer systems. In the case of a project-based learning process there is a need of introducing measure the student' activity as acquired via multiple modalities and then processed. The acquisition and processing needs to take into account the specificities of the learning context and deployment at schools, in particular in terms of system architecture. The paper proposes an architecture for the acquisition and processing of data for project-based LA designed to be interoperable and scalable. System design, details of the solutions and brief examples of acquired data are presented.
doi:10.1109/SAI.2016.7556079 Bibtex:
@inproceedings{ sai2016, author = {Ruffaldi,Emanuele and Dabisias, Giacomo and Landolfi, Lorenzo and Spikol, Daniel}, booktitle = {IEEE SAI Conference, London}, doi = {10.1109/SAI.2016.7556079}, keyword = {PELARS,pdf:2016_C_RuffaldiSAI.pdf,computer aided instruction;data acquisition;educational institutions;computer systems;data acquisition;data processing;learning context;learning deployment;multimodal learning analytic system;project-based LA design;project-based learning process;schools;student activity;student interaction;system architecture;Cameras;Computers;Context;Data collection;Data visualization;Sensors;Servers;Learning Analytics;data processing;learning;learning modalities;teacher support}, month = {July}, pages = {858--863}, publisher = {IEEE}, title = {Data collection and processing for a multimodal Learning Analytic System}, year = {2016} }
| |
|
| Exploring the interplay between human and machine annotated multimodal learning analytics in hands-on STEM Activities
Spikol Daniel, Avramide , Vogel Bathtijar, Luckin Rose, Ruffaldi Emanuele & Manolis Mavrikis
Learning Analytics and Knowledge Conference (LAK) (pp. 522-523). ACM,2016 Cite Details... doi:10.1145/2883851.2883920 Bibtex:
@inproceedings{lak2016,
author = {Spikol, Daniel and Avramide,s Katerina, Cukurova, Mutlu and Vogel, Bathtijar and Luckin, Rose and Ruffaldi, Emanuele and Manolis,Mavrikis},
booktitle = {Learning Analytics and Knowledge Conference (LAK)},
doi = {10.1145/2883851.2883920},
howpresented = {poster},
pages = {522--523},
publisher = {ACM},
title = {Exploring the interplay between human and machine annotated multimodal learning analytics in hands-on STEM Activities},
year = {2016}
}
| |
|
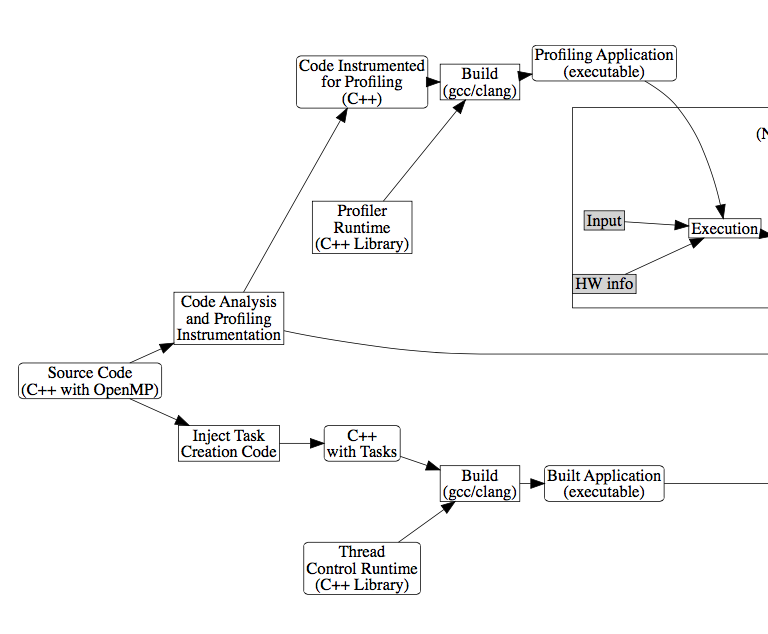
| SOMA: An OpenMP Toolchain For Multicore Partitioning
Ruffaldi Emanuele, Dabisias Giacomo, Brizzi Filippo & Buttazzo Giorgio
31st ACM/SIGAPP Symposium on Applied Computing (pp. 1231-1237). ACM,2016 Cite Details... | Abstract:Advancements in multicore platforms enabled the develop- ment of complex embedded systems incorporating algorithms that were typically executed on high-performance worksta- tions. Although many solutions exist today for supporting software development on multicore platforms, they rarely take timing constraints into account. This work presents a toolchain aimed at guaranteeing real-time constraints into parallel OpenMP code. This toolchain, called SOMA uses code profiling for estimating the multicore requirements and produces a static schedule for a set of parallel tasks. The toolchain is implemented using the source-to-source transla- tion capabilities of CLang. Performance results are provided on a computer vision application
doi:10.1145/2851613.2851720 Bibtex:
@inproceedings{ soma2016, author = {Ruffaldi, Emanuele and Dabisias, Giacomo and Brizzi, Filippo and Buttazzo, Giorgio}, booktitle = {31st ACM/SIGAPP Symposium on Applied Computing}, doi = {10.1145/2851613.2851720}, howpresented = {oral}, isbn = {978-145033739-7}, keyword = {multicore,OpenMP,pdf:2016_C_RuffaldiMP}, pages = {1231--1237}, publisher = {ACM}, title = {SOMA: An OpenMP Toolchain For Multicore Partitioning}, year = {2016} }
| |
|
| Toward Autonomous Robots for Demolitions in Unstructured Environments
Corucci Francesco & Ruffaldi Emanuele
Intelligent Autonomous Systems 13 (pp. 1515-1532). Springer International Publishing,2016 Cite Details... doi:10.1007/978-3-319-08338-4_109 Bibtex:
@inproceedings{ corucciIAS13, author = {Corucci, Francesco and Ruffaldi, Emanuele}, booktitle = {Intelligent Autonomous Systems 13}, bookurl = {http://www.springer.com/engineering/computational+intelligence+and+complexity/book/978-3-319-08337-7}, doi = {10.1007/978-3-319-08338-4_109}, editor = {Menegatti, Emanuele and Michael, Nathan and Berns, Karsten and Yamaguchi, Hiroaki}, isbn = {978-3-319-08337-7}, keyword = {pid:CP14.3,pdf:2014_C_IAS_Corucci,scopus:yes,youbot}, language = {English}, pages = {1515-1532}, publisher = {Springer International Publishing}, series = {Advances in Intelligent Systems and Computing}, title = {Toward Autonomous Robots for Demolitions in Unstructured Environments}, volume = {302}, year = {2016} }
| |
|
| A Haptic-Assisted Guidance System For Working Machines Based on Virtual Force Fields
Patrinostro Simone, Tanzini Matteo, Satler Massimo, Ruffaldi Emanuele, Filippeschi Alessandro & Avizzano Carlo Alberto
International Conference on Information, Communication and Automation Technologies (ICAT) (pp. 1-6). IEEE,2015 Cite Details... | Abstract:This paper presents a new approach to improve the remote navigation of a teleoperated demolition machine. To improve navigation usability of the teleoperated system the following topics will be covered: obstacle avoidance, wall alignment, and machine optimal positioning for demolition operations. In order to enhance the ability of the operator to navigate in a cluttered environment, a Haptic-Assisted Guidance System(HAGS) will be introduced. HAGS is a guidance system based on haptic simulation which improves the awareness of the operator on the surrounding environment. The solution proposed has been tested using a virtual environment scenario and a commercial Haptic interface, the results have been analyzed and discussed.
doi:10.1109/ICAT.2015.7340503 Bibtex:
@inproceedings{ tanzinipatri2015, author = {Patrinostro, Simone and Tanzini, Matteo and Satler, Massimo and Ruffaldi, Emanuele and Filippeschi, Alessandro and Avizzano, Carlo Alberto}, booktitle = {International Conference on Information, Communication and Automation Technologies (ICAT)}, city = {Sarajevo}, doi = {10.1109/ICAT.2015.7340503}, keyword = {haptics,virtual force fields,working machines,pdf:2015_C_ICATPatri,ScopusEID::2-s2.0-84960892298,scopus:yes}, pages = {1--6}, publisher = {IEEE}, title = {A Haptic-Assisted Guidance System For Working Machines Based on Virtual Force Fields}, year = {2015} }
| |
|
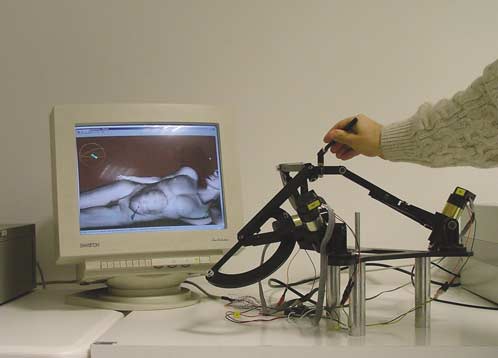
| An Optimal Geometric Model for Clavels Delta Robot
Avizzano Carlo Alberto, Alessandro Filippeschi, Jacinto Villegas Juan Manuel & Ruffaldi Emanuele
IEEE European Modeling Symposium (pp. 232-237). IEEE,2015 Cite Details... | Abstract:This paper discusses the Clavels Delta parallel robot and proposes an alternate solution to its kinemat- ics/dynamic model. We meant to integrate these models into on a small electrical driving circuit that integrates an onboard mi- crocontroller. We designed the solution by taking into account the reduced computing capability of small embedded systems. Direct kinematics (DK), differential kinematics, both direct (J) and inverse (invJ), and a simplified dynamic model will also be presented. The novelty of the approach relies in a series of geometric properties that allow to reduce the computational load. When the three kinematics are computed together (DK, J, invJ), their computations can be expressed in few lines of code. The accuracy of motion, as well as the reduced computing power, will be compared to classic algorithms . The proposed algorithms have been implemented in a working system in the context of a telemedicine project.
doi:10.1109/EMS.2015.84 Bibtex:
@inproceedings{ avizzano2015ems, author = {Avizzano ,Carlo Alberto and Alessandro,Filippeschi and Jacinto Villegas, Juan Manuel and Ruffaldi, Emanuele}, booktitle = {IEEE European Modeling Symposium}, city = {Madrid,Spain}, doi = {10.1109/EMS.2015.84}, isbn = {978-1-5090-0206-1}, keyword = {ReMeDi,haptics,delta,pdf:2015_C_AvizzanoEMS}, pages = {232--237}, publisher = {IEEE}, title = {An Optimal Geometric Model for Clavels Delta Robot}, year = {2015} }
| |
|
| A Low Cost Open-Controller for Interactive Robotic System
Jacinto Villegas Juan Manuel, Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
IEEE European Modeling Symposium (pp. 462-468). IEEE,2015 Cite Details... | Abstract:This paper presents the design and development of a new low cost device that allows real-time control application of a robotic system using novel methodologies of component based design: processor in the loop tuning and low/high level control. The particular design of this electronic board allows to control up to three permanent magnet (PM) DC motors per board that can be attached to magnetic or optical encoders. A triple USB connection can be used to program, debug and control simultaneously the different features of the board. Moreover, the generation of a new Simulink library allows debug for process analysis using Matlab/Simulink external mode as well as traditional code analysis protocol within the developer toolchain. The controller board has been developed for academic activities, but has also proven to be valid and robust in prototype application without requiring knowledge of device internals. The paper describes the design and hardware system, the development toolchain and evaluation test is presented and discussed.
doi:10.1109/EMS.2015.75 Bibtex:
@inproceedings{ jacinto2015ems, author = {Jacinto Villegas, Juan Manuel and Avizzano ,Carlo Alberto and Ruffaldi, Emanuele and Bergamasco, Massimo}, booktitle = {IEEE European Modeling Symposium}, city = {Madrid,Spain}, doi = {10.1109/EMS.2015.75}, isbn = {978-1-5090-0206-1}, keyword = {ReMeDi,electronics,pdf:2015_C_Jacinto}, pages = {462--468}, publisher = {IEEE}, title = {A Low Cost Open-Controller for Interactive Robotic System}, year = {2015} }
| |
|
| Augmented Reality-aided Tele-presence System for Robot Manipulation in Industrial Manufacturing
Peppoloni Lorenzo, Brizzi Filippo, Ruffaldi Emanuele & Avizzano Carlo Alberto
Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology (VRST) (pp. 237-240). ACM,2015 Cite Details... | Abstract:This work investigates the use of a highly immersive telepresence system for industrial robotics. A Robot Operating System integrated framework is presented where a remote robot is controlled through operator's movements and muscle contractions captured with a wearable device. An augmented 3D visual feedback is sent to the user providing the remote environment scenario from the robot's point of view and additional information pertaining to the task execution. The system proposed, using robot mounted RGB-D camera, identifies known objects and relates their pose to robot arm pose and to targets relevant to the task execution. The system is preliminary validated during a pick-and-place task using a Baxter robot. The experiment shows the practicability and the effectiveness of the proposed approach.
doi:10.1145/2821592.2821620 Bibtex:
@inproceedings{ peppoloni2015vrst, acmid = {2821620}, address = {New York, NY, USA}, author = {Peppoloni, Lorenzo and Brizzi, Filippo and Ruffaldi, Emanuele and Avizzano, Carlo Alberto}, booktitle = {Proceedings of the 21st ACM Symposium on Virtual Reality Software and Technology (VRST)}, doi = {10.1145/2821592.2821620}, isbn = {978-1-4503-3990-2}, keyword = {augmented and mixed reality, tele-operation and tele-presence, tracking and sensing,TAUM,AR,augmented reality,EMG,wearable,oculus,pdf:2015_C_VRST,Baxter,VR,AR,CoCo}, location = {Beijing, China}, numpages = {4}, pages = {237--240}, publisher = {ACM}, series = {VRST '15}, title = {Augmented Reality-aided Tele-presence System for Robot Manipulation in Industrial Manufacturing}, year = {2015} }
| |
|
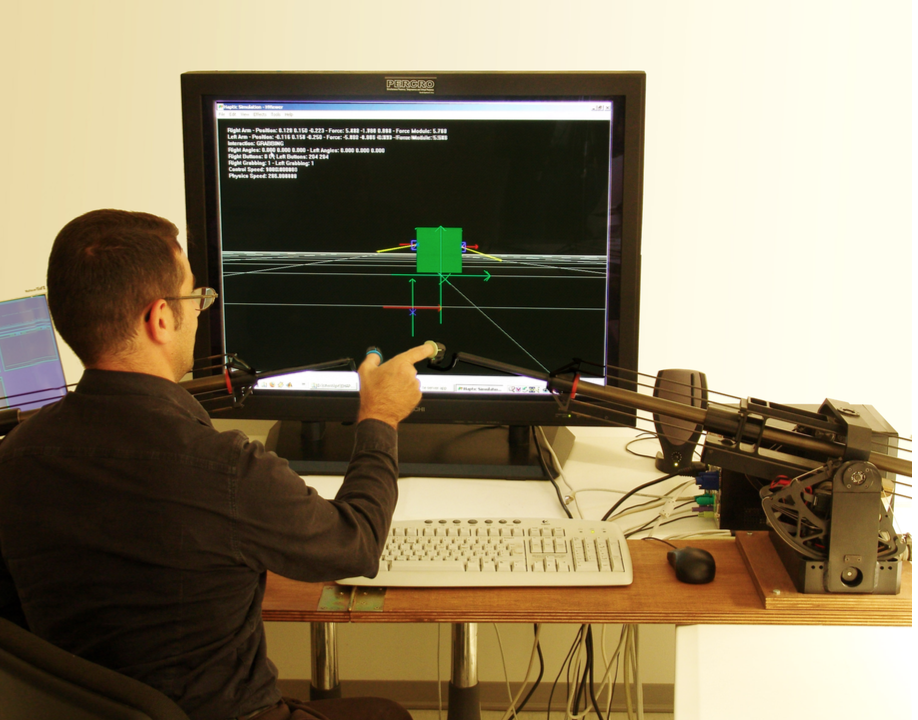
| Encountered-type haptic interface for virtual interaction with real objects based on implicit surface haptic rendering for remote palpation
Filippeschi Alessandro, Brizzi Filippo, Ruffaldi Emanuele, Jacinto Juan Manuel & Avizzano Carlo Alberto
IEEE IROS Proceedings (pp. 5904-5909). ,2015 Cite Details... | Abstract:The shortage of physicians afflicting developed
countries encourages engineers and doctors to collaborate
towards the development of telemedicine. In particular, robotic
systems have the potential for helping doctors making examination.
A very common examination that can be the goal of
a robotic system is palpation. Most of the robotics systems
that have been developed for palpation present interesting
features such as integrating augmented reality environments or
allowing for hand free interaction. In this paper we present
a novel palpation system that allows us to perform virtual
palpation of real objects by means of a haptic and an augmented
reality feedback. This system features an encountered-type
haptic interface in which the haptic feedback is calculated by a
collision detection algorithm that is based on online recording
of the surface to be touched. The system allows the users to
remove their hand from the haptic interface end-effector that
follows the user?s hand thanks to the tracking performed by
a Leap Motion. We show that the system provides a natural
interaction during the contact-non contact switch, a suitable
force during indentation, and it allows to discriminate objects
within the body through the haptic channel.
doi:10.1109/IROS.2015.7354216 Bibtex:
@inproceedings{ fili2015iros, author = {Filippeschi,Alessandro and Brizzi,Filippo and Ruffaldi,Emanuele and Jacinto, Juan Manuel and Avizzano, Carlo Alberto}, booktitle = {IEEE IROS Proceedings}, city = {Hamburg,Germany}, doi = {10.1109/IROS.2015.7354216}, keyword = {ReMeDi,haptics,AR,pdf:2015_C_IROS_Filippeschi,CoCo}, pages = {5904--5909}, title = {Encountered-type haptic interface for virtual interaction with real objects based on implicit surface haptic rendering for remote palpation}, year = {2015} }
| |
|
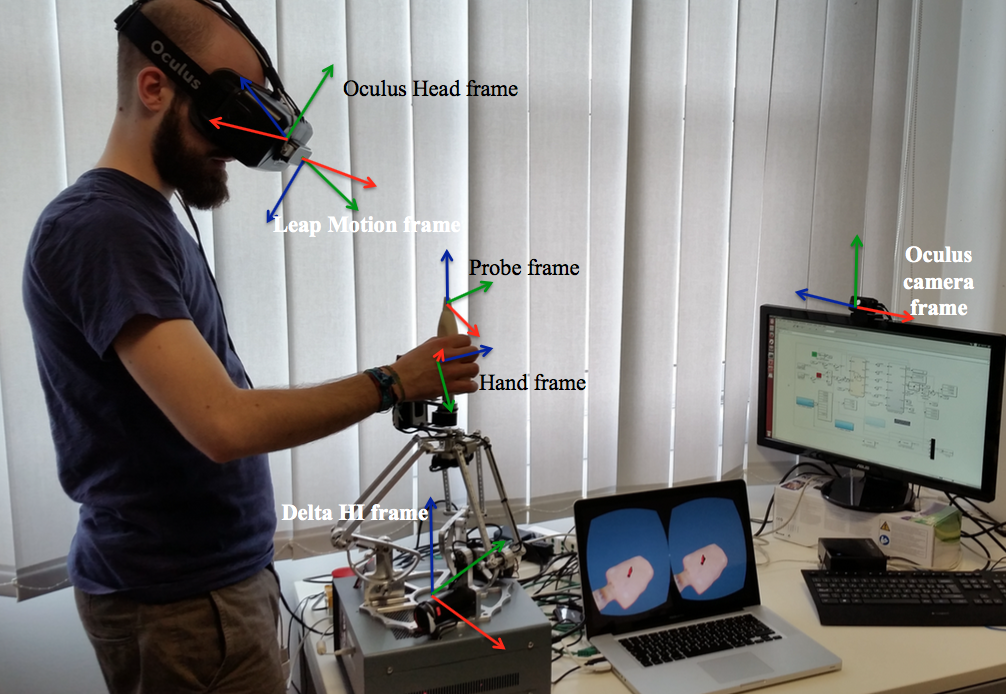
| Co-Located haptic interaction for Virtual USG exploration
Ruffaldi Emanuele, Brizzi Filippo, Filippeschi Alessandro & Avizzano Carlo Alberto
Proceedings of IEEE EMBC (pp. 1548-1551). ,2015 Cite Details... | Abstract:Ultrasonography is a widespread diagnostic tech- nique that can take advantage of virtual reality techniques for the purpose of training and rehearsal. The placement, orientation and body interaction of the probe is fundamental for the execution of the exploration. This paper introduces a virtual reality setup that employs visuo-haptic feedback for virtual ultrasonography. The haptic feedback is provided by desktop delta-like haptic interface with a 3D printed ultrasonography probe, and employs haptic point-cloud rendering with implicit surface rendering. The visual feedback is provided by a Head Mounted Display that displays the virtual body, the probe and the operators hand while not in contact with the probe. The system provides a co-located experience by means of precise calibration of the reference system allowing to synchronize the display of the hand and the probe with the location of the corresponding physical entities.
doi:10.1109/EMBC.2015.7318667 Bibtex:
@inproceedings{ ruffaldiusg15, author = {Ruffaldi ,Emanuele and Brizzi, Filippo and Filippeschi ,Alessandro and Avizzano ,Carlo Alberto}, booktitle = {Proceedings of IEEE EMBC}, doi = {10.1109/EMBC.2015.7318667}, keyword = {ReMeDi,AR,Delta,haptics,pdf:2015_C_EMBCRuffaldi,CoCo}, pages = {1548--1551}, title = {Co-Located haptic interaction for Virtual USG exploration}, year = {2015} }
| |
|
| Human motion energy harvesting using a piezoelectric MFC patch
Bassani Giulia, Filippeschi Alessandro & Ruffaldi Emanuele
Proceedings of IEEE EMBC (pp. 5070-5073). ,2015 Cite Details... | Abstract:The improvements in efficiency of electronic com- ponents and miniaturization is quickly pushing wearable de- vices and cloth-embedded electronics. Human energy harvesting is a way to power these components reducing the need of batteries and charging. Among the different approaches in harvesting energy, the use of kinetic energy is quite interesting in particular for powering during exercise and moving activity independently of body temperature. This work explores the case of kinetic energy from bending of a piezoelectric patch. For assessing the quality of the system a testing setup has been designed and controlled by means of knee joint recordings obtained from a large motion dataset. The results of the chosen patch is presented with promising results.
doi:10.1109/EMBC.2015.7319531 Bibtex:
@inproceedings{ bassanizero15, author = {Bassani, Giulia and Filippeschi ,Alessandro and Ruffaldi ,Emanuele}, booktitle = {Proceedings of IEEE EMBC}, doi = {10.1109/EMBC.2015.7319531}, keyword = {zeropower,harvesting,wearable,pdf:2015_C_Bassani}, pages = {5070--5073}, title = {Human motion energy harvesting using a piezoelectric MFC patch}, xhowpresented = {poster}, year = {2015} }
| |
|
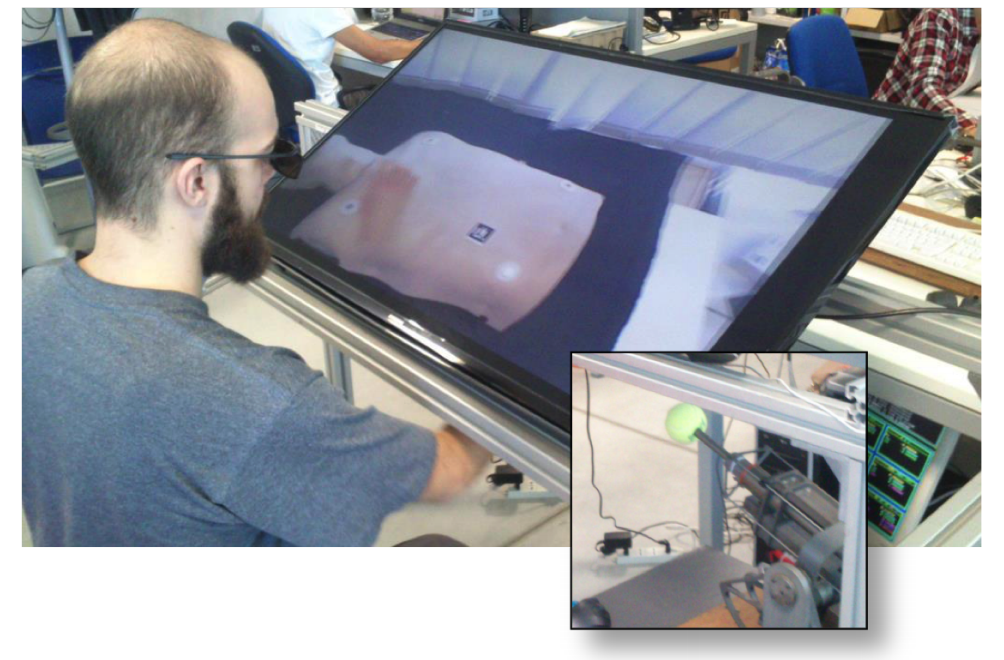
| Encountered haptic Augmented Reality interface for remote examination
Ruffaldi Emanuele, Filippeschi Alessandro, Jacinto Juan Manuel, Brizzi Filippo & Avizzano Carlo Alberto
Proceedings of IEEE 3DUI (pp. 179-180). ,2015 Cite Details... | Abstract:This paper presents an interaction system for haptic based remote
palpation and in general remote examination. In particular the proposed
approach combines 3D representation of the remote environment
with encountered haptic feedback aiming at high transparency
and natureleness of interaction. The paradigm is described as interaction
design and system implementation.
doi:10.1109/3DUI.2015.7131759 Bibtex:
@inproceedings{ ruffaldienc15, author = {Ruffaldi ,Emanuele and Filippeschi ,Alessandro and Jacinto ,Juan Manuel and Brizzi, Filippo and Avizzano ,Carlo Alberto}, booktitle = {Proceedings of IEEE 3DUI}, doi = {10.1109/3DUI.2015.7131759}, howpresented = {poster}, keyword = {ReMeDi,AR,GRAB,haptics,scopus:yes,pdf:2015_C_3DUI_Ruffaldi,AR,haptics,CoCo}, pages = {179--180}, title = {Encountered haptic Augmented Reality interface for remote examination}, year = {2015} }
| |
|
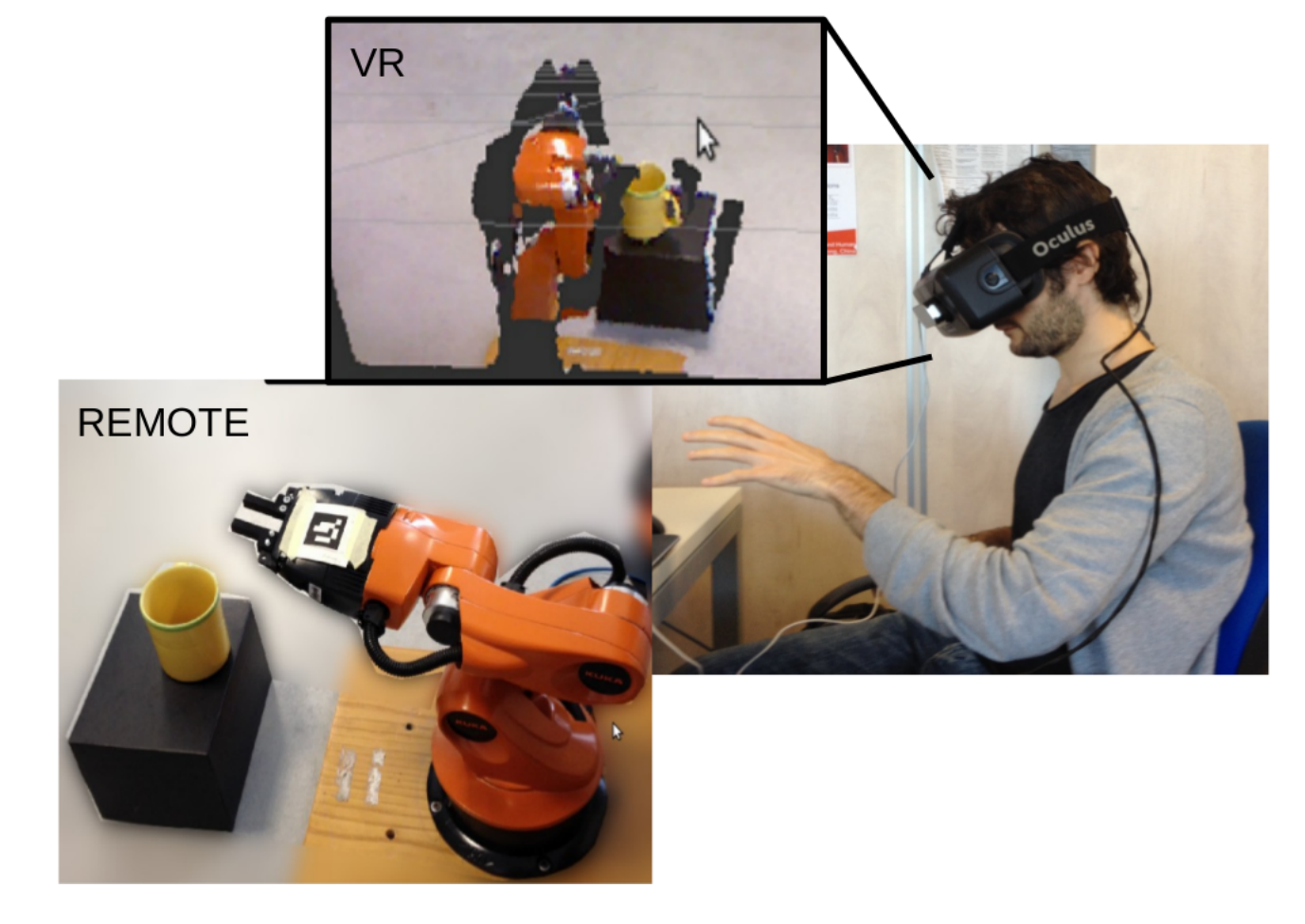
| Immersive ROS-integrated framework for robot teleoperation
Peppoloni Lorenzo, Brizzi Filippo, Avizzano Carlo Alberto & Ruffaldi Emanuele
Proceedings of IEEE 3DUI (pp. 177-178). ,2015 Cite Details... | Abstract:The development of natural interfaces for human-robot interaction
provides the user an intuitive way to control and guide robots. In
this paper, we propose a novel ROS (Robot Operating System)-
integrated interface for remote control that allows the user to teleoperate
the robot using his hands motion. The user can adjust online
the autonomy of the robot between two levels: direct control and
waypoint following. The hand tracking and gestures recognition
capabilities of the Leap Motion device are exploited to generate the
control commands. The user receives a real-time 3D augmented
visual feedback using a Kinect sensor and a HMD. To assess the
practicability of the system experimental results are presented using
as a benchmark the remote control of a Kuka Youbot.
doi:10.1109/3DUI.2015.7131758 Bibtex:
@inproceedings{ peppoloniros15, author = {Peppoloni ,Lorenzo and Brizzi, Filippo and Avizzano ,Carlo Alberto and Ruffaldi,Emanuele}, booktitle = {Proceedings of IEEE 3DUI}, doi = {10.1109/3DUI.2015.7131758}, howpresented = {poster}, keyword = {TAUM,AR,Youbot,scopus:yes,pdf:2015_C_3DUI_Peppoloni,CoCo}, pages = {177--178}, title = {Immersive ROS-integrated framework for robot teleoperation}, year = {2015} }
| |
|
| CSCL Opportunities with Digital Fabrication through Learning Analytics
Spikol Daniel, Avramides Katerina, Katterfeldt Eva-sophie, Ruffaldi Emanuele & Cuartelles David
Exploring the Material Conditions of Learning : Computer Supported Collaborative Learning (CSCL) Conference 2015;2 (pp. 697-698). ,2015 Cite Details... Bibtex:
@inproceedings{ pelars2, author = {Spikol, Daniel and Avramides,Katerina and Katterfeldt,Eva-Sophie and Ruffaldi,Emanuele and Cuartelles, David}, booktitle = {Exploring the Material Conditions of Learning : Computer Supported Collaborative Learning (CSCL) Conference 2015;2}, editor = {International Society of the Learning Sciences}, howpresented = {poster}, isbn = {978-0-9903550-7-6}, issn = {1573-4552}, keyword = {PELARS,pdf:2015_P_Spikol}, pages = {697--698}, title = {CSCL Opportunities with Digital Fabrication through Learning Analytics}, year = {2015} }
| |
|
| A Learning Analytics framework for practice-based learning
Dabisias Giacomo, Spikol Daniel & Ruffaldi Emanuele
Exploring the Material Conditions of Learning : Computer Supported Collaborative Learning (CSCL) Conference 2015;2 (pp. 740-742). ,2015 Cite Details... | Abstract:The role of the PELARS Learning Analytics System (LAS) system is to collect information from students performing project-based tasks, reason on such information and provide visualization to teachers and students, that is usable for understanding the learning process. The information collected by the LAS comprises pieces of information collected directly by the Students, and other collected by the System automatically. In this work we will provide a comprehensive description of the framework and the motivations behind the various decisions. The software framework will be described starting from the broad vision of the context and then the different components will be described in detail.
Bibtex:
@inproceedings{ pelars1, author = {Dabisias,Giacomo and Spikol, Daniel and Ruffaldi,Emanuele}, booktitle = {Exploring the Material Conditions of Learning : Computer Supported Collaborative Learning (CSCL) Conference 2015;2}, editor = {International Society of the Learning Sciences}, howpresented = {poster}, isbn = {978-0-9903550-7-6}, issn = {1573-4552}, keyword = {PELARS,pdf:2015_P_PELARSLAS}, pages = {740--742}, title = {A Learning Analytics framework for practice-based learning}, year = {2015} }
| |
|
| Towards Smart Farming and Sustainable Agriculture with Drones
Tripicchio Paolo, Satler Massimo, Dabisias Giacomo, Ruffaldi Emanuele & Avizzano Carlo Alberto
IE, 11th IEEE International Conference on Intelligent Environments (pp. 140-143). IEEE,2015 Cite Details... | Abstract:The use of drones in agriculture is becoming more and more popular. The paper presents a novel approach to dis- tinguish between different fields plowing techniques by means of an RGB-D sensor. The presented system can be easily integrated in commercially available Unmanned Aerial Vehicles (UAVs). In order to successfully classify the plowing techniques, two different measurement algorithms have been developed. Experimental tests show that the proposed methodology is able to provide a good classification of the fields plowing depths
doi:10.1109/IE.2015.29 Bibtex:
@inproceedings{ farming15, author = {Tripicchio, Paolo and Satler, Massimo and Dabisias, Giacomo and Ruffaldi, Emanuele and Avizzano, Carlo Alberto}, booktitle = {IE, 11th IEEE International Conference on Intelligent Environments}, city = {Prague}, date = {15-17 July 2015}, doi = {10.1109/IE.2015.29}, dummy = {}, keyword = {pdf:2015_C_Campi,IEEE}, pages = {140--143}, publisher = {IEEE}, title = {Towards Smart Farming and Sustainable Agriculture with Drones}, year = {2015} }
| |
|
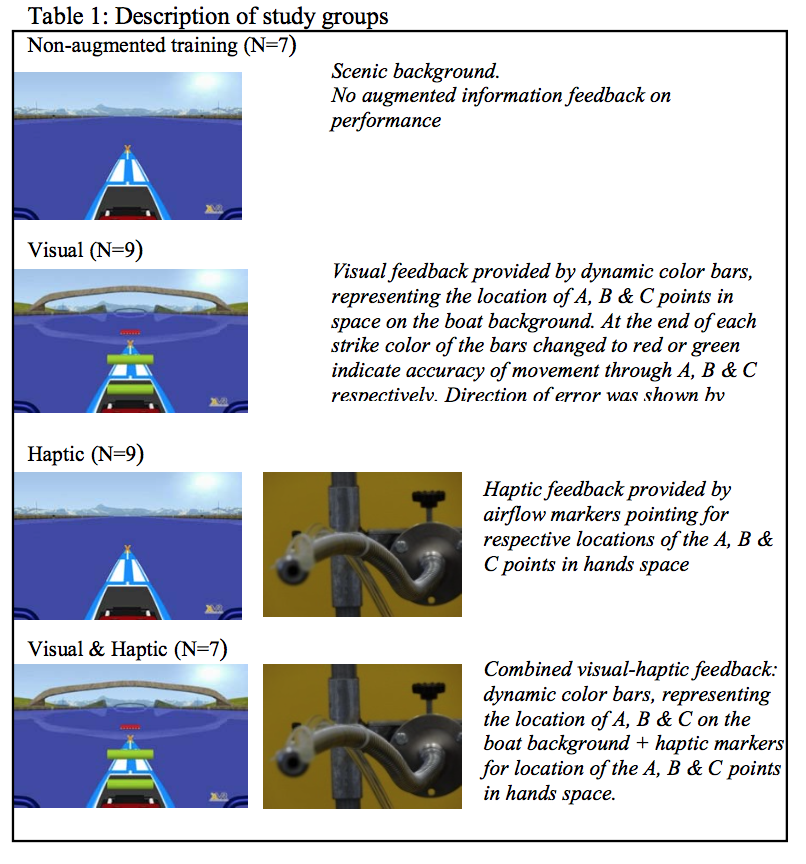
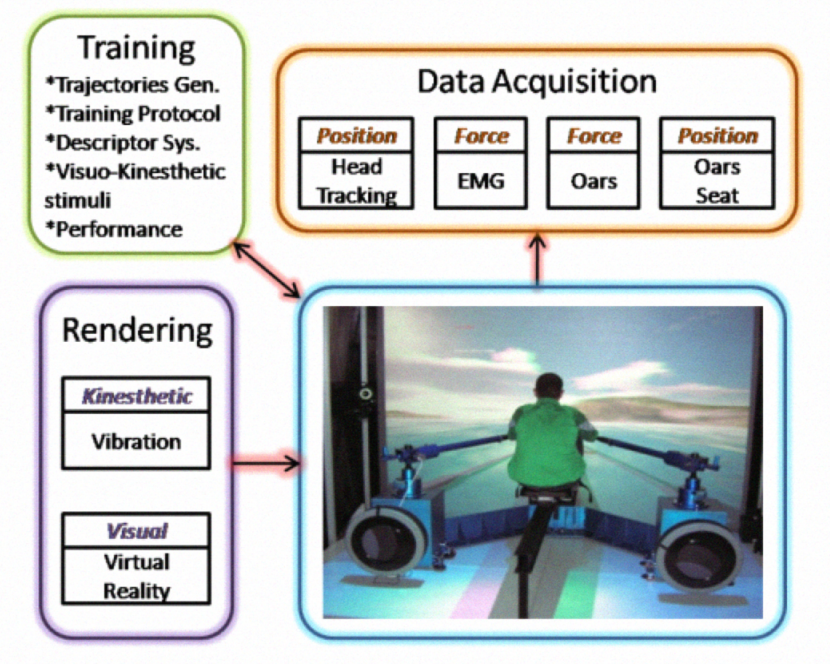
| Evaluation of multimodal feedback effects on the time-course of motor learning in multimodal VR platform for rowing training
Korman Maria, Yifat Shorr, Gopher Daniel, Filippeschi Alessandro & Ruffaldi Emanuele
ICVR, International Conference on Virtual Rehabilitation (pp. 158-159). IEEE,2015 Cite Details... | Abstract:This study focused on the benefits of feedback augmentation for multi-session training of a complex motor-cognitive skill of indoor rowing in virtual environment. Specifically, we compared the effectiveness of augmented information feedback provided per training trial either visually, haptically or visual- haptically to the non-augmented condition, where no on-line feedback on task performance was afforded during training sessions. Surprisingly, the non-augmented training group was in general as successful in the long-term learning of a rowing skill as the augmented groups and according to some measures even superior to them. Our results also highlight important differences in the course of learning and skill representation upon different feedback conditions provided during training and may provide useful insights to the optimization for both sport and rehabilitation training protocols in VR
doi:10.1109/ICVR.2015.7358628 Bibtex:
@inproceedings{ row15korman, author = {Korman,Maria and Yifat,Shorr and Gopher,Daniel and Filippeschi,Alessandro and Ruffaldi,Emanuele}, booktitle = {ICVR, International Conference on Virtual Rehabilitation}, doi = {10.1109/ICVR.2015.7358628}, dummy = {}, howpresented = {poster}, keyword = {rowing,SKILLS,pdf:2015_P_ICVRYifat,haptics}, pages = {158--159}, publisher = {IEEE}, title = {Evaluation of multimodal feedback effects on the time-course of motor learning in multimodal VR platform for rowing training}, year = {2015} }
| |
|
| A networked haptic embedded controller
Avizzano Carlo Alberto, Ruffaldi Emanuele, Leonardis D. & Bergamasco Massimo
Industrial Embedded Systems (SIES), 2014 9th IEEE International Symposium on (pp. 52-57). ,2014 Cite Details... doi:10.1109/SIES.2014.6871186 Bibtex:
@inproceedings{ avizzanoSIES14, author = {Avizzano, C.A. and Ruffaldi, E. and Leonardis, D. and Bergamasco, M.}, booktitle = {Industrial Embedded Systems (SIES), 2014 9th IEEE International Symposium on}, doi = {10.1109/SIES.2014.6871186}, keyword = {Internet;controllers;haptic;embedded systems;haptic interfaces;microprocessor chips;rendering (computer graphics);dual core processor;embedded computing systems;haptic devices;haptic rendering;high-level application layers;home appliances;low-level controls;network controller;networked haptic embedded controller;smart TV;smart devices;web server interface;Browsers;Digital signal processing;Force;Haptic interfaces;Protocols;Rendering (computer graphics);Web server,pid:CP14.4,ugov:yes,pdf:2014_C_SIES_Avizzano,scopus:yes}, month = {June}, pages = {52-57}, title = {A networked haptic embedded controller}, year = {2014} }
| |
|
| Evaluating Virtual Embodiment with the ALEx Exoskeleton
Ruffaldi Emanuele, Barsotti Michele, Leonardis Daniele, Bassani Giulia, Frisoli Antonio & Bergamasco Massimo
Haptics: Neuroscience, Devices, Modeling, and Applications (EuroHaptics 2014) (pp. 133-140). Springer Berlin Heidelberg,2014 Cite Details... | Abstract:The assessment of virtual embodiment has focused primarily on experimental paradigms based on multisensory congruent cues, such as auditory, tactile, visual and motor, mainly due to the technological limitations of haptic feedback. In this work virtual embodiment in an avatar is assessed by means of a new lightweight exoskeleton (ALEx) with a focus on the perception of danger and aggressive behavior. In particular an experiment has been designed assessing the effectiveness of haptic feedback while interacting with an opponent avatar. Experiments are evaluated based on physiological measures and questionnaires.
doi:10.1007/978-3-662-44193-0_18 Bibtex:
@inproceedings{ ruffaldiEH14, author = {Ruffaldi, Emanuele and Barsotti, Michele and Leonardis, Daniele and Bassani, Giulia and Frisoli, Antonio and Bergamasco, Massimo}, booktitle = {Haptics: Neuroscience, Devices, Modeling, and Applications (EuroHaptics 2014)}, doi = {10.1007/978-3-662-44193-0_18}, editor = {Auvray, Malika and Duriez, Christian}, howpresented = {poster}, isbn = {978-3-662-44192-3}, keyword = {pid:CP14.5,pdf:2014_CH_EH_Ruffaldi,VERE,VR,exos,haptics,scopus:yes}, language = {English}, pages = {133-140}, publisher = {Springer Berlin Heidelberg}, series = {Lecture Notes in Computer Science}, title = {Evaluating Virtual Embodiment with the ALEx Exoskeleton}, year = {2014} }
| |
|
| Assessment of task ergonomics with an upper limb wearable device
Peppoloni Lorenzo, Filippeschi Alessandro & Ruffaldi Emanuele
Control and Automation (MED), 2014 22nd Mediterranean Conference of (pp. 340-345). ,2014 Cite Details... doi:10.1109/MED.2014.6961394 Bibtex:
@inproceedings{ peppoloniMED14, author = {Peppoloni, L. and Filippeschi, A. and Ruffaldi, E.}, booktitle = {Control and Automation (MED), 2014 22nd Mediterranean Conference of}, doi = {10.1109/MED.2014.6961394}, keyword = {ERGANE,motion,electromyography;ergonomics;medical signal processing;EMG;EMG sensors;ULWMSD diagnosis;ecologic environment;forearm flexor muscle monitoring;human upper limb;inertial units;kinematic chain;muscle effort assessment;muscular effort;objective assessment;pen-and-paper observational techniques;shoulder;task ergonomics assessment;three DoFs;three degrees of freedom;two DoFs;upper limb posture reconstruction;upper limb wearable device;upper limb work-related musculo skeletal disorders;video tapes;wired system;work-related pathologies;wrist;Elbow;Electromyography;Joints;Monitoring;Muscles;Sensors;Wrist,pdf:2014_C_MED_Peppoloni,pid:CP14.6,scopus:yes}, month = {June}, pages = {340-345}, title = {Assessment of task ergonomics with an upper limb wearable device}, video = {https://www.youtube.com/watch?v=HCMgtPqMci4}, year = {2014} }
| |
|
| A novel wearable biometric capture system
Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
Control and Automation (MED), 2014 22nd Mediterranean Conference of (pp. 351-355). ,2014 Cite Details... doi:10.1109/MED.2014.6961396 Bibtex:
@inproceedings{ avizzanoMED14, author = {Avizzano, C.A. and Ruffaldi, E. and Bergamasco, M.}, booktitle = {Control and Automation (MED), 2014 22nd Mediterranean Conference of}, doi = {10.1109/MED.2014.6961396}, keyword = {ERGANE,motion,biometrics (access control);electromyography;embedded systems;feature extraction;software architecture;user interfaces;ADC channels;EMG acquisition;EMG reconstruction;Web interface;embedded computing system;extensible computing system;feature detection;host system;inertial measurement units;magnetic measurement units;motion reconstruction;muscular stress;myo-electric signals;plugin architecture;portable server architecture;shared library;software architecture;wearable biometric capture system;Biomedical monitoring;Computer architecture;Data visualization;Electromyography;Sensors;Servers;Wireless communication,pid:CP14.7,ugov:yes,pdf:2014_C_MED_Avizzano}, month = {June}, pages = {351-355}, title = {A novel wearable biometric capture system}, year = {2014} }
| |
|
| A ROS-integrated architecture to learn manipulation tasks from a single demonstration
Peppoloni Lorenzo, Di Fava Alessandro, Ruffaldi Emanuele & Avizzano Carlo Alberto
Robot and Human Interactive Communication, 2014 RO-MAN: The 23rd IEEE International Symposium on (pp. 537-542). ,2014 Cite Details... | Abstract:In the robot programming by demonstration (PbD) framework, the high-level representation of a skill in a series of action units gives an intuitive method to program and instruct robot behaviors. In this context we present a ROS (Robot Operating System) integrated architecture for learning households manipulation tasks by one observation. The user is observed during the execution of everyday tasks, every action is analyzed and its effect is translated into changes in the environment state. During the observation a strip-like map of the task is built and stored as a sequence of actions. From the map obtained the task can be performed. A planner robustly adapts the execution both to different environment initial conditions and to possible faults, occurring during the operations. We test the capability of the chosen approach to autonomously learn and robustly perform complex tasks, such as setting up and clearing a table in a real kitchen-like environment.
doi:10.1109/ROMAN.2014.6926308 Bibtex:
@inproceedings{ peppoloni2014roman, author = {Peppoloni, L. and Di Fava, A. and Ruffaldi, E. and Avizzano, C.A.}, booktitle = {Robot and Human Interactive Communication, 2014 RO-MAN: The 23rd IEEE International Symposium on}, doi = {10.1109/ROMAN.2014.6926308}, keyword = {manipulators;operating systems (computers);robot programming;service robots;ROS-integrated architecture;high-level skill representation;household manipulation task learning;intuitive method;kitchen-like environment;robot behaviors;robot operating system;robot programming;strip-like map;task planner;Glass;Navigation;Planning;Robot programming;Silicon;Trajectory,pid:CP14.8,ugov:yes,pdf:2014_C_ROMAN_Peppoloni}, month = {Aug}, pages = {537-542}, title = {A ROS-integrated architecture to learn manipulation tasks from a single demonstration}, year = {2014} }
| |
|
| A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models
Ruffaldi Emanuele, Peppoloni Lorenzo, Filippeschi Alessandro & Avizzano Carlo Alberto
Robotics and Automation (ICRA), 2014 IEEE International Conference on (pp. 1247-1252). ,2014 Cite Details... | Abstract:Wearable motion tracking systems represent a breakthrough in ecological motion tracking. Their effectiveness has been proved in many fields, from performance assessment to human-robot interaction. Most of the approaches are based on the exploitation of optimal probabilistic filtering of inertial motion units (IMUs) signals, ranging from linear Kalman Filters (KF) to Particle filters (PF). Since most of the models are highly nonlinear, filters such as Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) are typically used. These approaches cause all the variables of the models to be correlated each other. Probabilistic Graphical Models (PGM) are a framework for probabilistic reasoning that allows to explicitly declare the actual dependencies among variables. In this paper we propose a novel algorithm for motion tracking with IMUs based on PGM. The model is compared to the state of the art UKF algorithm in tracking the human upper limb. The results show that the proposed approach perform a slightly better compared to the UKF.
doi:10.1109/ICRA.2014.6907013 Bibtex:
@inproceedings{ ruffaldi2014pgm, author = {Ruffaldi, E. and Peppoloni, L. and Filippeschi, A. and Avizzano, C.A.}, booktitle = {Robotics and Automation (ICRA), 2014 IEEE International Conference on}, doi = {10.1109/ICRA.2014.6907013}, keyword = {motion,ERGANE,Kalman filters;imu,sensor fusion,biosensors;human-robot interaction;inertial systems;nonlinear filters;probability;tracking;EKF;IMU;PGM;UKF;ecological motion tracking;extended Kalman filter;inertial motion units;linear Kalman filters;motion tracking;optimal probabilistic filtering;particle filters;probabilistic graphical models;probabilistic reasoning;unscented Kalman filter;wearable motion tracking systems;wearable sensors;Equations;Estimation;Joints;Kalman filters;Kinematics;Mathematical model;Tracking,pdf:2014_C_ICRA_Ruffaldi,pid:CP14.1,ugov:yes}, month = {May}, pages = {1247-1252}, title = {A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models}, year = {2014} }
| |
|
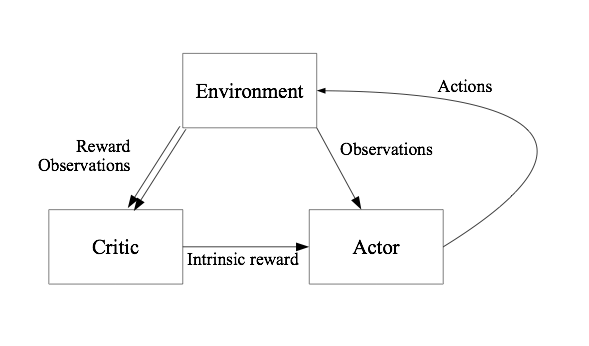
| A connectionist actor-critic algorithm for faster learning and biological plausibility
Johard Leonard & Ruffaldi Emanuele
Robotics and Automation (ICRA), 2014 IEEE International Conference on (pp. 3903-3909). ,2014 Cite Details... doi:10.1109/ICRA.2014.6907425 Bibtex:
@inproceedings{ johard2014, author = {Johard, L. and Ruffaldi, E.}, booktitle = {Robotics and Automation (ICRA), 2014 IEEE International Conference on}, doi = {10.1109/ICRA.2014.6907425}, keyword = {biology computing;gradient methods;learning (artificial intelligence);neural nets;biologically plausible actor-critic algorithm;connectionist actor-critic algorithm;dopaminergic signaling patterns;intrinsic reward system;model-free reinforcement learning;neural actor-critic;polecart problem;policy gradients;Backpropagation;Biological system modeling;Learning (artificial intelligence);Neurons;Supervised learning;Training,pid:CP14.2,ugov:yes,pdf:2014_C_ICRA_Johard,scopus:yes}, month = {May}, pages = {3903-3909}, title = {A connectionist actor-critic algorithm for faster learning and biological plausibility}, year = {2014} }
| |
|
| A novel 7 degrees of freedom model for upper limb kinematic reconstruction based on wearable sensors
Peppoloni Lorenzo, Filippeschi Alessandro, Ruffaldi Emanuele & Avizzano Carlo Alberto
Intelligent Systems and Informatics (SISY), 2013 IEEE 11th International Symposium on (pp. 105-110). ,2013 Cite Details... | Abstract:Wearable motion tracking systems have gained large popularity in the last decades because of their effectiveness in many fields, from performance assessment to human-robot interaction. Among all the approaches, those based on inertial sensors have been widely explored. Since inertial sensors are affected by measurements drift, they need to be aided by other sensors, thus requiring sensor measurements to be fused. The most used sensor fusion techniques are based on Kalman filter. In particular, the Extended Kalman Filter (EKF) and the Unscented Kalman Filter (UKF) are used because of the non linearity characterizing most of the models. They often aim at reconstructing human motion by estimating limbs orientation, involving human's kinematics to constrain relative motion of the limbs. These models often neglect part of the degrees of freedom (DoFs) that characterize human upper limbs, especially when modeling humerus motion with respect to the chest. In this paper we present a novel 7 DoFs model which represents a trade-off between modeling accuracy and complexity for the human upper limb. In particular, we model the human shoulder girdle taking into account also the humerus head's elevation and the retraction due to the scapula's and the clavicle's motions. The model exploits inertial sensors measurements by means of an Unscented Kalman filter to reconstruct human movements. The system performance is validated firstly against a reconstruction based on an optical tracking system. Secondly, the 5 DoFs model extracted form the 7 DoFs one was checked to have state of the art performance and used to estimate the improvement of position estimation that are obtained by extending the model to 7 DoFs.
doi:10.1109/SISY.2013.6662551 Bibtex:
@inproceedings{ peppoloni2013novel, author = {Peppoloni, L. and Filippeschi, A. and Ruffaldi, E. and Avizzano, C.A.}, booktitle = {Intelligent Systems and Informatics (SISY), 2013 IEEE 11th International Symposium on}, doi = {10.1109/SISY.2013.6662551}, keyword = {star:,motion,ERGANE,IMU,sensor fusion,Kalman filters;biomechanics;motion estimation;nonlinear filters;physiological models;sensor fusion;wearable computers;7 degrees of freedom model;clavicle motions;human movement reconstruction;human shoulder girdle;human upper limb;humerus head elevation;inertial sensors measurements;optical tracking system;position estimation;scapula motions;unscented Kalman filter;upper limb kinematic reconstruction;wearable sensors;Adaptive optics;Estimation;Joints;Kinematics;Optical sensors;Shoulder,pid:CP13.3,scopus:yes,pdf:2013_C_SISYPeppoloni}, month = {Sept}, pages = {105-110}, title = {A novel 7 degrees of freedom model for upper limb kinematic reconstruction based on wearable sensors}, year = {2013} }
| |
|
| A flexible framework for mobile based haptic rendering
Ruffaldi Emanuele, Satler Massimo, Rosati Papini Gastone Pietro & Avizzano Carlo Alberto
Robot and Human Interactive Communication, RO-MAN. The 22nd IEEE International Symposium on (pp. 732-737). ,2013 Cite Details... doi:10.1109/ROMAN.2013.6628400 Bibtex:
@inproceedings{ ruffaldi2013flexible, author = {Ruffaldi, Emanuele and Satler, Massimo and Rosati Papini, Gastone Pietro and Avizzano, Carlo Alberto}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 22nd IEEE International Symposium on}, doi = {10.1109/ROMAN.2013.6628400}, keyword = {pid:CP13.2,Motore,scopus:yes,haptics,pdf:2013_C_ROMAN_Motore}, organization = {IEEE}, pages = {732--737}, title = {A flexible framework for mobile based haptic rendering}, year = {2013} }
| |
|
| A novel human-machine interface for working machines operation
Tanzini Matteo, Tripicchio Paolo, Ruffaldi Emanuele, Galgani Guido, Lutzemberger Giovanni & Avizzano Carlo Alberto
Robot and Human Interactive Communication, RO-MAN. The 22nd IEEE International Symposium on (pp. 744-750). ,2013 Cite Details... | Abstract:The future of working machines winks to semi autonomy and latest technological aids to improve the quality of operations as well as the easiness of specific tasks execution. This field can take great advantage of latest human-machine interface (HMI) technologies that has been applied in the last years in field like virtual environments and robotics. The present paper discusses a novel approach for interactive operation of working machines. The approach combines traditional controls with visual/vision and haptic interactions. A wearable projection system has been introduced with the purpose of describing a wide set of localized commands recognized by the system's vision module. A preliminary setup has been developed using a simplified demonstration platform. A test session applied to a manipulation robot is presented to evaluate the performance of the proposed solutions in terms of task effectiveness, neglect tolerance, interaction effort and usability of the human-machine interface.
doi:10.1109/ROMAN.2013.6628402 Bibtex:
@inproceedings{ tanzini2013novel, author = {Tanzini, Matteo and Tripicchio, Paolo and Ruffaldi, Emanuele and Galgani, Guido and Lutzemberger, Giovanni and Avizzano, Carlo Alberto}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 22nd IEEE International Symposium on}, doi = {10.1109/ROMAN.2013.6628402}, keyword = {pid:CP13.1,scopus:yes,pdf:2013_C_ROMANmachine,ScopusEID:2-s2.0-84889561257}, organization = {IEEE}, pages = {744--750}, title = {A novel human-machine interface for working machines operation}, year = {2013} }
| |
|
| A method for digital representation of human movements
Lippi Vittorio, Avizzano Carlo Alberto & Ruffaldi Emanuele
Robot and Human Interactive Communication, RO-MAN. The 21st IEEE International Symposium on (pp. 404-410). ,2012 Cite Details... doi:10.1109/ROMAN.2012.6343786 Bibtex:
@inproceedings{ lippi2012method, author = {Lippi, Vittorio and Avizzano, Carlo Alberto and Ruffaldi, Emanuele}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 21st IEEE International Symposium on}, doi = {10.1109/ROMAN.2012.6343786}, keyword = {pid:CP12.2,scopus:yes,pdf:2012_C_ROMANDR}, organization = {IEEE}, pages = {404--410}, title = {A method for digital representation of human movements}, year = {2012} }
| |
|
| Capturing the rower performance on the SPRINT platform
Filippeschi Alessandro, Tripicchio Paolo, Satler Massimo & Ruffaldi Emanuele
Intelligent Environments (Workshops) (pp. 331-340). IOS Press,2012 Cite Details... doi:10.3233/978-1-61499-080-2-331 Bibtex:
@inproceedings{ filippeschi2012capturing, author = {Filippeschi, Alessandro and Tripicchio, Paolo and Satler, Massimo and Ruffaldi, Emanuele}, booktitle = {Intelligent Environments (Workshops)}, doi = {10.3233/978-1-61499-080-2-331}, editor = {Botia,J.A. and others}, howpresented = {talk}, keyword = {pid:CP12.1,rowing,pdf:2012_C_IErow}, pages = {331--340}, publisher = {IOS Press}, series = {Ambient Intelligence and Smart Environments}, title = {Capturing the rower performance on the SPRINT platform}, year = {2012} }
| |
|
| Evaluation of the light weight Juggling system
Lagarde Julien, Zelic Gregory, Avizzano Carlo Alberto, Lippi Vittorio, Ruffaldi Emanuele, Zalmanov Hagar, Lammfromm Rotem, Erev-yehene Vered, Gillian Nick, Omodrain Sile, Mottet Denis & Gopher Daniel
1st SKILLS International Conference ,2011 Cite Details... | Abstract:This paper presents the training of juggling skills, a highly complex problem of coordination, under tight time and space constraints. This training is achieved with a simple training platform, a light weight juggling platform (LWJ), and is compared to training with real balls. The principle directing the design of the platform is to obtain a simple tool. The simplification, in comparison to real world juggling, is based on the identification of invariant properties in the spatiotemporal coordination of intermediate and expert jugglers. Two classes training solutions were added to the LWJ: An audio-tactile pacing or augmented multimodal environment, and the manipulation of cognitive components of the juggling skills. The transfer to juggling with real balls was evaluated in four different experiments.
doi:10.1051/bioconf/20110100053 Bibtex:
@inproceedings{ julien11, author = {Lagarde, Julien and Zelic, Gregory and Avizzano, Carlo Alberto and Lippi, Vittorio and Ruffaldi, Emanuelle and Zalmanov, Hagar and Lammfromm, Rotem and Erev-Yehene, Vered and Gillian, Nick and OModrain, Sile and Mottet, Denis and Gopher, Danny}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100053}, keyword = {pdf:2011_C_Lagarde,SKILLS,juggling,skills}, title = {Evaluation of the light weight Juggling system}, x = {}, year = {2011} }
| |
|
| Real-time error detection for a rowing training system
Johard Leonard, Filippeschi Alessandro & Ruffaldi Emanuele
1st SKILLS International Conference ,2011 Cite Details... | Abstract:The use of coaches in training provides several advantages to the skill transfer process. However, their use is limited because of cost reasons. Automatic recognition processes, on the other hand, have a vastly lower cost ratio and can replace or integrate many of the functions otherwise performed by a human. The paper presents an effective design of a real-time error recognition system for rowing in a simulator. It was designed in order to be easy to develop, be computationally efcient and offer an excellent classication ability.
doi:10.1051/bioconf/20110100044 Bibtex:
@inproceedings{ johard11, author = {Johard, L. and Filippeschi , A. and Ruffaldi, E.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100044}, keyword = {pdf:2011_C_Johard,SKILLS,rowing,ML}, title = {Real-time error detection for a rowing training system}, x = {}, year = {2011} }
| |
|
| Machine Learning Analysis of Binaural Rowing Sounds
Johard Leonard, Ruffaldi Emanuele, Hoffmann P., Filippeschi Alessandro & Ruffaldi Emanuele
1st SKILLS International Conference ,2011 Cite Details... | Abstract:Techniques for machine hearing are increasing their potentiality due to new application domains. In this work we are addressing the analysis of rowing sounds in natural context for the purpose of supporting a training system based on virtual environments. This paper presents the acquisition methodology and the evaluation of different machine learning techniques for classifying rowing-sound data. We see that a combination of principal component analysis and shallow networks perform equally well as deep architectures, while being much faster to train.
doi:10.1051/bioconf/20110100043 Bibtex:
@inproceedings{ johard11ML, author = {Johard, L. and Ruffaldi, E. and Hoffmann, P. and Filippeschi , A. and Ruffaldi, E.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100043}, keyword = {pdf:2011_C_JohardML,SKILLS,rowing,sound,ML}, title = {Machine Learning Analysis of Binaural Rowing Sounds}, x = {}, year = {2011} }
| |
|
| Filtering Motion Data Through Piecewise Polynomial Approximation
Lippi Vittorio, Avizzano Carlo Alberto & Ruffaldi Emanuele
1st SKILLS International Conference ,2011 Cite Details... | Abstract:In this work we propose a system to lter human movement data and store them into a compact representation. We are interested both in noise reduction and in segmentation. The method described in this paper relies on a iterative optimization and guarantee to converge to a local optimum: it proved anyway to produce stable results and to provide an accurate segmentation on the analyzed data . We analyze the Three ball cascade Juggling as case study: This provides us the challenge to represent both low-pass dynamics of human limbs and juggled balls and the discontinuities produced by contact forces.
doi:10.1051/bioconf/20110100057 Bibtex:
@inproceedings{ lippi11pi, author = {Lippi, V. and Avizzano, Carlo Alberto and Ruffaldi, E.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100057}, keyword = {pdf:2011_C_LippiPi,SKILLS,motion}, title = {Filtering Motion Data Through Piecewise Polynomial Approximation}, x = {}, year = {2011} }
| |
|
| Mastering Energy Management During Rowing Using Virtual Reality
Hoffmann C., Filippeschi Alessandro, Ruffaldi Emanuele, Blanc S., Verbrugge L. & Bardy Benoit
1st SKILLS International Conference ,2011 Cite Details... | Abstract:This study focused on one of the most important factors in rowing performance which is the ability demonstrated by elite rowers to regulate their effort during a 2000m race in order to produce their best performance. Experts are known to adopt a particular pacing strategy with a fast-start profile. The purpose of our study was to test by using virtual reality whether novice rowers were able to acquire this energy management skill during a 2000m race, with positive consequences for their rowing performance. Participants from the Avatar group were instructed to track a virtual boat, which velocity was previously calibrated to follow the appropriate to-be-learned velocity profile. This group was contrasted with a control group, which followed a classic training procedure. Our results indicate that the avatar group improved its performance (decrease in race duration), learned and maintained the expert profile. These effects were absent in the control group. Together, these results indicate that virtual reality can be used to accelerate the learning of energy-related skills.
doi:10.1051/bioconf/20110100035 Bibtex:
@inproceedings{ hoffman11, author = {Hoffmann, C. and Filippeschi, A. and Ruffaldi, E. and Blanc, S. and Verbrugge, L. and Bardy, B.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100035}, keyword = {pdf:2011_C_HoffmannEn,minor:,SKILLS,rowing,VR}, title = {Mastering Energy Management During Rowing Using Virtual Reality}, x = {}, year = {2011} }
| |
|
| Training Rowing with Virtual Environments
Ruffaldi Emanuele, Filippeschi Alessandro, Bardy Benoit, Marin, Varlet M., Hoffmann C., Korman M., Gopher Daniel & Bergamasco Massimo
1st SKILLS International Conference ,2011 Cite Details... | Abstract:This paper presents the results of the design, implementation and evaluation of a platform for rowing training in Virtual Reality called SPRINT. The paper discusses how various aspects of the rowing skill can be analyzed and trained over a single common methodology and system platform. The result is a vision for new directions in the domain of sport training with Virtual Reality.
doi:10.1051/bioconf/20110100078 Bibtex:
@inproceedings{ ruffaldi11tr, author = {Ruffaldi, Emanuele and Filippeschi, A. and Bardy , B. and Marin , L., and Varlet, M. and Hoffmann,C. and Korman, M. and Gopher, D. and Bergamasco, M.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100078}, keyword = {pdf:2011_C_RuffaldiRow,VR,SKILLS,rowing,minor:}, title = {Training Rowing with Virtual Environments}, x = {}, year = {2011} }
| |
|
| Uncontrolled manifold and Juggling: Retrieving a set of Controlled Variables from Data
Lippi Vittorio, Ruffaldi Emanuele, Zelic Gregory, Lagarde Julien, Tripicchio Paolo & Avizzano Carlo Alberto
1st SKILLS International Conference ,2011 Cite Details... | Abstract:In this paper we analyze the concept of UnControlled Manifold (UCM), that consists in the kinematic variables that are not controlled by the user, being not relevant to the task. We proceed testing a set of controlled variables inspired by the literature about tracking task, then we propose a procedure to identify them on the basis of captured data.
We are interested in the analysis of behavior in a Virtual Environment and in the real world. In particular we analyze the three ball cascade juggling and its simulation through a platform named Light Weight Juggling focusing on the task of ball tossing. Users arm kinematics is represented as a robotic manipulator with 7 degrees of freedom. Joint angles are retrieved through an optical tracking system. The variables controlled in the virtual environment are a subset of the ones controlled in the real world, that leads to an UM that differs from the one in the real world. A comparison between the statistics computed in the two cases is performed to explore behavioral differences in the two cases.
doi:10.1051/bioconf/20110100056 Bibtex:
@inproceedings{ lippi11ma, author = {Lippi, V. and Ruffaldi, E. and Zelic, Gregory and Lagarde, Julien and Tripicchio, P. and Avizzano, Carlo Alberto}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100056}, keyword = {pdf:2011_C_LippiMa,SKILLS,juggling,motion}, title = {Uncontrolled manifold and Juggling: Retrieving a set of Controlled Variables from Data}, x = {}, year = {2011} }
| |
|
| Preliminary evaluation of timing training accelerator for the SPRINT rowing system
Filippeschi Alessandro, Ruffaldi Emanuele & Korman M.
1st SKILLS International Conference ,2011 Cite Details... | Abstract:This paper shows the selection and preliminary evaluation of rowing gesture timing training on the SPRINT platform. After the analysis of experts gestures and a literature review of rowing technique features, the selection of proper feedbacks and the development of the training protocol are investigated. The general problem discussed here is the learning of timing of complex motor pattern under the effect of load. Eight novice adults participated the experiment, half of them receiving vibrotactile feedback (VIB), both receiving knowledge of results (KR) after training blocks. Preliminary results show the difculty people had to accomplish the task and to exploit feedback. There is in fact no evidence of feedback effectiveness when comparing VIB-KR and KR group. Some causes were hypothesized and a side effect of load condition arisen from data. Therefore timing training will be further investigated exploiting information gathered.
doi:10.1051/bioconf/20110100025 Bibtex:
@inproceedings{ filippeschi11ex, author = {Filippeschi , A. and Ruffaldi, E. and Korman, M.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100025}, keyword = {pdf:2011_C_FilippeschiTi,SKILLS,rowing,minor:}, title = {Preliminary evaluation of timing training accelerator for the SPRINT rowing system}, x = {}, year = {2011} }
| |
|
| Expert rowers motion analysis for synthesis and technique digitalization
Filippeschi Alessandro & Ruffaldi Emanuele
1st SKILLS International Conference ,2011 Cite Details... | Abstract:Four expert rowers gestures were gathered on the SPRINT rowing platform with the aid of an optic motion tracking system. Data were analyzed in order to get a digital representation of the features involved in rowing. Moreover, these data provide a dataset for developing digital models for rowing motion synthesis. Rowers were modeled as kinematic chains, data were processed in order to get position and orientation of upper body limbs. This representation was combined with SPRINT data in order to evaluate features found in the literature, to find new ones and to build models for the generation of rowing motion. The analysis shows the effectiveness of the motion reconstruction and two examples of technique features: stroke timing and upper limbs orientation during the finish phase.
doi:10.1051/bioconf/20110100024 Bibtex:
@inproceedings{ filippeschi11ex, author = {Filippeschi , A. and Ruffaldi, E.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100024}, keyword = {pdf:2011_C_FilippeschiEx,SKILLS,rowing}, title = {Expert rowers motion analysis for synthesis and technique digitalization}, x = {}, year = {2011} }
| |
|
| Exploratory analysis on the binaural characteristics of the rowing sound
Hoffmann P.F., Hammershoi Dorte, Ruffaldi Emanuele & Filippeschi Alessandro
1st SKILLS International Conference ,2011 Cite Details... | Abstract:Differences between the signals captured at the entrances to the left and right ears are generally quantied by interaural time differences (ITDs), interaural level differences (ILDs) and interaural crosscorrelation (IC). Here, we attempt to gain knowledge on the changes of these interaural parameters during rowing and to evaluate their potential as source of information to determine rowing expertise exclusively from acoustic signals.
doi:10.1051/bioconf/20110100037 Bibtex:
@inproceedings{ hoffmann11, author = {Hoffmann, P. F. and Hammershoi, Dorte and Ruffaldi, E. and Filippeschi , A.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100037}, keyword = {pdf:2011_C_Hoffmann,SKILLS,rowing,sound}, title = {Exploratory analysis on the binaural characteristics of the rowing sound}, x = {}, year = {2011} }
| |
|
| Evaluation of multimodal feedback effects on improving rowing competencies
Schorr Y., Filippeschi Alessandro, Gopher Daniel, Ruffaldi Emanuele & Korman M.
1st SKILLS International Conference ,2011 Cite Details... | Abstract:This study focused on the selection and preliminary evaluation of different types of modal and information feedback in virtual environment to facilitate acquisition and transfer of a complex motor-cognitive skill of rowing. Specifically, we addressed the effectiveness of immediate information feedback provided visually as compared to sensory haptic feedback on the improvement in hands kinematics and changes in cognitive load during the course of learning the basic rowing technique. Several pilot experiments described in this report lead to the evaluation and optimization of the training protocol, to enhance facilitatory effects of adding visual and haptic feedback during training.
doi:10.1051/bioconf/20110100083 Bibtex:
@inproceedings{ schorr11, author = {Schorr, Y. and Filippeschi, A. and Gopher, D. and Ruffaldi, E. and Korman, M.}, booktitle = {1st SKILLS International Conference}, doi = {10.1051/bioconf/20110100083}, keyword = {pdf:2011_C_Shorr,SKILLS,rowing}, title = {Evaluation of multimodal feedback effects on improving rowing competencies}, x = {}, year = {2011} }
| |
|
| MOTORE: A mobile haptic interface for neuro-rehabilitation
Avizzano Carlo Alberto, Satler Massimo, Cappiello Giovanni, Scoglio Andrea, Ruffaldi Emanuele & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 20th IEEE International Symposium on (pp. 383-388). ,2011 -- Cite this for citing the MOTORE haptic device Cite Details... | Abstract:The present paper introduces a novel type of haptic interface which is fully portable and employs only onboard sensors and electronics to solve accurate localization and force feedback generation. The device offers 2DOF force control while sliding on a plane and maintaining its orientation comfortable for the user. The device generates force feedback information without any intermediate link between the motion wheels and the grasping handle. The device has been designed for application in neuro-rehabilitation protocols and it adopts specific mechanical, electrical and control solutions in order to cope with patient requirements. The paper describes the mechanical and electronic solutions as well as the most relevant features of control implementation issues that were addressed in the system design.
doi:10.1109/ROMAN.2011.6005238 Bibtex:
@inproceedings{ avizzano2011motore, author = {Avizzano, Carlo Alberto and Satler, Massimo and Cappiello, Giovanni and Scoglio, Andrea and Ruffaldi, Emanuele and Bergamasco, Massimo}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 20th IEEE International Symposium on}, doi = {10.1109/ROMAN.2011.6005238}, keyword = {star:,pid:CP11.13,Motore,scopus:yes,haptics,pdf:2011_C_ROMAN_Motore,ScopusEID:2-s2.0-80052986282,scopus:yes}, note = {Cite this for citing the MOTORE haptic device}, organization = {IEEE}, pages = {383--388}, title = {MOTORE: A mobile haptic interface for neuro-rehabilitation}, year = {2011} }
| |
|
| Control of a desktop mobile haptic interface
Satler Massimo, Avizzano Carlo Alberto & Ruffaldi Emanuele
World Haptics Conference (WHC). IEEE (pp. 415-420). ,2011 Cite Details... doi:10.1109/WHC.2011.5945522 Bibtex:
@inproceedings{ satler2011control, author = {Satler, Massimo and Avizzano, Carlo A and Ruffaldi, Emanuele}, booktitle = {World Haptics Conference (WHC). IEEE}, doi = {10.1109/WHC.2011.5945522}, keyword = {pid:CP11.12,Motore,haptics,pdf:2011_C_WHCmotore}, organization = {IEEE}, pages = {415--420}, title = {Control of a desktop mobile haptic interface}, year = {2011} }
| |
|
| A low-cost human locomotion speed recognition for augmented virtual environments exploration
Vela Nunez M, Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
Human System Interactions, HSI. The 4th IEEE International Conference on (pp. 136-143). ,2011 Cite Details... | Abstract:This paper presents a novel and low-cost interface designed for real-time human locomotion speed recognition, which fits with the exploration of kinesthetic virtual environments (VE). According to the interface paradigm, the human locomotion recognition feeds VE navigation control. An experimental session has been organized in order to acquire acceleration data related to locomotion of 10 healthy subjects (men and women) aging between 23 and 35 years. A treadmill has been used to capture the velocity at which subjects were moving. Our system was designed to optimize classification performances in human locomotion speed recognition in real-time. The recognized human speed locomotion has been shown to enhance users' sensation of presence in the virtual environment. A simple scenario has been developed to assess the system functionality. The experiments carried out show that our system is excellent at classifying a wide range of human locomotion and can be used both in virtual and augmented reality (VR) environments for improved interaction.
doi:10.1109/HSI.2011.5937356 Bibtex:
@inproceedings{ vela2011low, author = {Vela Nunez, M and Avizzano, Carlo Alberto and Ruffaldi, Emanuele and Bergamasco, Massimo}, booktitle = {Human System Interactions, HSI. The 4th IEEE International Conference on}, doi = {10.1109/HSI.2011.5937356}, keyword = {pid:CP11.11,motion,scopus:yes,pdf:2011_C_HSIwalk}, organization = {IEEE}, pages = {136--143}, title = {A low-cost human locomotion speed recognition for augmented virtual environments exploration}, year = {2011} }
| |
|
| Skill Modeling and Feedback Design for Training Rowing with Virtual Environments
Ruffaldi Emanuele, Filippeschi Alessandro, Avizzano Carlo Alberto & Bergamasco Massimo
Skill Training in Multimodal Virtual Environments (International Conference on Applied Human Factors and Ergonomics, AHFE) (pp. 832-841). CRC Press,2010 Cite Details... doi:10.1201/EBK1439834916-c83 Bibtex:
@inproceedings{ Ruffaldi2010skillrowahfe, author = {Ruffaldi, Emanuele and Filippeschi, Alessandro and Avizzano, CarloAlberto and Bergamasco, Massimo}, booktitle = {Skill Training in Multimodal Virtual Environments (International Conference on Applied Human Factors and Ergonomics, AHFE)}, day = {23}, doi = {10.1201/EBK1439834916-c83}, isbn = {978-1-4398-3491-6}, keyword = {haptics,pdf:2010_C_AHFErow,skills,rowing,SPRINT,SKILLS}, month = {Jun}, pages = {832-841}, publisher = {CRC Press}, series = {Advances in Human Factors and Ergonomics Series}, title = {Skill Modeling and Feedback Design for Training Rowing with Virtual Environments}, year = {2010} }
| |
|
| Digital Management and Representation of Perceptual Motor Skills
Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
Advances in Cognitive Ergonomics (International Conference on Applied Human Factors and Ergonomics, AHFE) (pp. 863-872). CRC Press,2010 Cite Details... doi:10.1201/EBK1439834916-c86 Bibtex:
@inproceedings{ avizzano2010ahfedr, author = {Avizzano, CarloAlberto and Ruffaldi, Emanuele and Bergamasco, Massimo}, booktitle = {Advances in Cognitive Ergonomics (International Conference on Applied Human Factors and Ergonomics, AHFE)}, day = {23}, doi = {10.1201/EBK1439834916-c86}, isbn = {978-1-4398-3491-6}, keyword = {pdf:2010_C_AHFEdr,skills}, month = {Jun}, pages = {863-872}, publisher = {CRC Press}, series = {Advances in Human Factors and Ergonomics Series}, title = {Digital Management and Representation of Perceptual Motor Skills}, year = {2010} }
| |
|
| Haptics Technologies in the Framework of Training Systems
Bergamasco Massimo, Avizzano Carlo Alberto & Ruffaldi Emanuele
Advances in Cognitive Ergonomics (International Conference on Applied Human Factors and Ergonomics, AHFE) (pp. 873-882). CRC Press,2010 Cite Details... doi:10.1201/EBK1439834916-c87 Bibtex:
@inproceedings{ Bergamasco2010haphafe, author = {Bergamasco, Massimo and Avizzano, CarloAlberto and Ruffaldi, Emanuele}, booktitle = {Advances in Cognitive Ergonomics (International Conference on Applied Human Factors and Ergonomics, AHFE)}, day = {23}, doi = {10.1201/EBK1439834916-c87}, isbn = {978-1-4398-3491-6}, keyword = {haptics,pdf:2010_C_AHFEhap,skills,SKILLS}, month = {Jun}, pages = {873-882}, publisher = {CRC Press}, series = {Advances in Human Factors and Ergonomics Series}, title = {Haptics Technologies in the Framework of Training Systems}, year = {2010} }
| |
|
| A Measuring Tool for Accurate Haptic Modeling in Industrial Maintenance Training
Tripicchio Paolo, Filippeschi Alessandro, Ruffaldi Emanuele, Tecchia Franco, Avizzano Carlo Alberto & Bergamasco Massimo
Haptics: Generating and Perceiving Tangible Sensations (EuroHaptics 2010) (pp. 377-384). Springer Berlin Heidelberg,2010 Cite Details... doi:10.1007/978-3-642-14075-4_56 Bibtex:
@inproceedings{ tripicchio2010measuring, author = {Tripicchio, Paolo and Filippeschi, Alessandro and Ruffaldi, Emanuele and Tecchia, Franco and Avizzano, Carlo Alberto and Bergamasco, Massimo}, booktitle = {Haptics: Generating and Perceiving Tangible Sensations (EuroHaptics 2010)}, doi = {10.1007/978-3-642-14075-4_56}, editor = {Kappers, AstridM.L. and van Erp, JanB.F. and Bergmann Tiest, WouterM. and van der Helm, FransC.T.}, isbn = {978-3-642-14074-7}, keyword = {haptic modeling; ergonomics; sensing tool,scopus:yes,pid:CP10.9,haptics,pdf:2010_C_EHTool}, language = {English}, pages = {377-384}, publisher = {Springer Berlin Heidelberg}, series = {Lecture Notes in Computer Science}, title = {A Measuring Tool for Accurate Haptic Modeling in Industrial Maintenance Training}, volume = {6192}, year = {2010} }
| |
|
| A multimodal training platform for minimally invasive robotic surgery
Konietschke Rainer, Tobergte Andreas, Preusche Carsten, Tripicchio Paolo, Ruffaldi Emanuele, Webel Sabine & Bockholt Uli
Robot and Human Interactive Communication, RO-MAN. The 19th IEEE International Symposium on (pp. 422-427). ,2010 Cite Details... doi:10.1109/ROMAN.2010.5598608 Bibtex:
@inproceedings{ konietschke2010multimodal, author = {Konietschke, Rainer and Tobergte, Andreas and Preusche, Carsten and Tripicchio, Paolo and Ruffaldi, Emanuele and Webel, Sabine and Bockholt, Uli}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 19th IEEE International Symposium on}, doi = {10.1109/ROMAN.2010.5598608}, keyword = {pid:CP10.4,scopus:yes,haptics,pdf:2010_C_ROMANsur,SKILLS}, organization = {IEEE}, pages = {422--427}, title = {A multimodal training platform for minimally invasive robotic surgery}, year = {2010} }
| |
|
| Effect of delay on dynamic targets tracking performance and behavior in virtual environment
Lippi Vittorio, Avizzano Carlo Alberto, Mottet Denis & Ruffaldi Emanuele
Robot and Human Interactive Communication, RO-MAN. The 19th IEEE International Symposium on (pp. 446 - 451). ,2010 Cite Details... | Abstract:We analyze the impact of the delay between the sensors and the visualization on the performance at a catching task in virtual environment. Testers have been asked to interact with a virtual environment displayed on a 2D screen in front of them, catching, with the virtual hand, virtual balls falling from the top of the screen. Two thresholds have been inferred: a behavioral threshold delay beyond which the behavioral organization is sensibly affected and a performance threshold delay beyond which task performance begins to worsen. We found a drop in performance when the total delay is over 70-80 ms, yet without significant changes in the organization of successful catches. Although the presence of a threshold on behavior is still to be further investigated, these two thresholds give a practical indication for the design and the validation of virtual reality based training systems. This is especially important in the context of training human skills in virtual environment: in particular to assess the quality of a training platform simulating the three ball cascade juggling pattern.
doi:10.1109/ROMAN.2010.5598607 Bibtex:
@inproceedings{ lippi2010effect, author = {Lippi, Vittorio and Avizzano, Carlo Alberto and Mottet, Denis and Ruffaldi, Emanuele}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 19th IEEE International Symposium on}, doi = {10.1109/ROMAN.2010.5598607}, isbn = {978-1-4244-7991-7}, issn = {1944-9445}, keyword = {pid:CP10.3,scopus:yes,pdf:2010_C_ROMANdelay}, organization = {IEEE}, pages = {446 - 451}, title = {Effect of delay on dynamic targets tracking performance and behavior in virtual environment}, year = {2010} }
| |
|
| Human gait recognition for virtual environments exploration
Nunez MarinaVela, Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 19th IEEE International Symposium on (pp. 1-8). ,2010 Cite Details... | Abstract:This paper presents a novel use of sensor sytem for human gait recognition evolution to be employed in virtual environments exploration. The system allows free human motion inside a virtual environment employing human gait recognition. Experimental sessions have been organized in order to acquire acceleration data related to walking and running of several subjects. We present an algorithm that recognizes a person gait in real-time. The recognized motion can be used to enhance the presence of the user in the virtual environment. A simple scenario has been developed to assess the system functionality. The experiments carried out show that our system is suitable to classify human motion, count steps and, moreover, can be used both in virtual and augmented reality (VR) environments for an improved interaction.
doi:10.1109/ROMAN.2010.5654679 Bibtex:
@inproceedings{ nunez2010human, author = {Nunez, Marina Vela and Avizzano, Carlo Alberto and Ruffaldi, Emanuele and Bergamasco, Massimo}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 19th IEEE International Symposium on}, doi = {10.1109/ROMAN.2010.5654679}, keyword = {pid:CP10.2,pdf:2010_C_ROMANhuman}, organization = {IEEE}, pages = {1--8}, title = {Human gait recognition for virtual environments exploration}, year = {2010} }
| |
|
| Visualizing perspectives and trends in robotics based on patent mining
Ruffaldi Emanuele, Sani Elisabetta & Bergamasco Massimo
Robotics and Automation (ICRA), 2010 IEEE International Conference on (pp. 4340-4347). ,2010 Cite Details... | Abstract:Technological and fundamental developments in robotics can emerge from various sources like publications or international research plans. Among the various sources of analysis, patents results valuable in expressing the efforts performed both by companies and research institutions. This work takes the occasion of the fifty years of robotics for presenting an analysis and visualization of trends in robotics by means of patent mining. This work focuses, in particular, on the domains of rehabilitation and surgical robotics. The discussed methodology highlights the role of haptic interfaces in these fields and the relationships between relevant companies.
doi:10.1109/ROBOT.2010.5509648 Bibtex:
@inproceedings{ ruffaldi2010visualizing, author = {Ruffaldi, E. and Sani, E. and Bergamasco, M.}, booktitle = {Robotics and Automation (ICRA), 2010 IEEE International Conference on}, doi = {10.1109/ROBOT.2010.5509648}, issn = {1050-4729}, keyword = {control engineering computing;data mining;medical robotics;patents;research and development;fundamental developments;haptic interfaces;international research plans;patent mining;publications;rehabilitation;surgical robotics;technological developments;Cognitive robotics;Information resources;Licenses;Parallel robots;Performance analysis;Protection;Rehabilitation robotics;Robotics and automation;Surgery;Visualization,pid:CP10.1,scopus:yes,pdf:2010_C_ICRA_303579}, month = {May}, pages = {4340-4347}, title = {Visualizing perspectives and trends in robotics based on patent mining}, year = {2010} }
| |
|
| Digital representation of skills for human-robot interaction
Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 17th IEEE International Symposium on (pp. 769-774). ,2009 Cite Details... doi:10.1109/ROMAN.2009.5326295 Bibtex:
@inproceedings{ avizzano2009digital, author = {Avizzano, Carlo Alberto and Ruffaldi, Emanuele and Bergamasco, Massimo}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 17th IEEE International Symposium on}, doi = {10.1109/ROMAN.2009.5326295}, keyword = {pid:CP9.12,scopus:yes,pdf:2009_C_ROMANDR,SKILLS}, organization = {IEEE}, pages = {769--774}, title = {Digital representation of skills for human-robot interaction}, year = {2009} }
| |
|
| Bimanual Haptic-desktop platform for upper-limb post-stroke rehabilitation: Practical trials
Li S., Frisoli Antonio, Avizzano Carlo Alberto, Ruffaldi Emanuele, Lugo-villeda L.i. & Bergamasco Massimo
Robotics and Biomimetics (ROBIO), 2009 IEEE International Conference on (pp. 480-485). ,2009 Cite Details... | Abstract:This paper presents three haptic-based virtual applications for the undergoing rehabilitation of upper-limb post stroke patients. The three exercises are developed for their use on the multi-modal interface so-called Bimanual Haptic Desktop System (BHDS), which integrates the haptic functionalities and Video Display Terminal (VDT) within the work-plane of a desk. Firstly, two basic exercises, tracking task and lifting task, are carried out for the recovery of basic arm motion-coordination skills and steadiness of patients' upper-limb. Secondly, a video-game-like exercise, catching task, is developed to compare online the performance of healthy upper-limb with impaired ones wherein hand-eye coordination exercise of the patient is included. To this end, the proposed exercises provide to patients the potential methods to train their post-stroke upper-limbs malfunctions while reporting the quantitative parameters obtained to evaluate the improvement of patients recovery. Experimental results of a preliminary evaluation on healthy subjects are then reported and discussed to visualize in near future a pilot medical trials of the system on impaired people.
doi:10.1109/ROBIO.2009.5420694 Bibtex:
@inproceedings{ li2009, author = {Li, S. and Frisoli, A. and Avizzano, C.A. and Ruffaldi, E. and Lugo-Villeda, L.I. and Bergamasco, M.}, booktitle = {Robotics and Biomimetics (ROBIO), 2009 IEEE International Conference on}, doi = {10.1109/ROBIO.2009.5420694}, keyword = {biology computing;haptic interfaces;patient rehabilitation;virtual reality;arm motion-coordination skills;bimanual haptic desktop system;hand-eye coordination exercise;haptic-based virtual applications;multimodal interface;patient recovery;post-stroke upper-limbs malfunctions;robotic mediated rehabilitation devices;upper limb post stroke patient rehabilitation;video display terminal;Biomimetics;Displays;Haptic interfaces;Medical robotics;Medical treatment;Rehabilitation robotics;Robot kinematics;Tracking;Virtual reality;Visualization,pid:CP9.11,scopus:yes,haptics,pdf:2009_C_BIOdual,SKILLS}, month = {Dec}, pages = {480-485}, title = {Bimanual Haptic-desktop platform for upper-limb post-stroke rehabilitation: Practical trials}, year = {2009} }
| |
|
| Haptic guidance of light-exoskeleton for arm-rehabilitation tasks
Lugo-villeda LuisIvan, Frisoli Antonio, Sandoval-gonzalez Oscar Osvaldo, Padilla MiguelA, Parra-vega Vicente, Avizzano Carlo Alberto, Ruffaldi Emanuele & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 18th IEEE International Symposium on (pp. 903-908). ,2009 Cite Details... | Abstract:Fixed-Base Exoskeleton applications have increased rapidly in the last few years, evidently as part of promising rehabilitation robotic programs of the robotics worldwide community, where in particular Human-Robot-Interaction (HRI) plays an important role in its design and control because they are tightly coupled to human-limbs. Exoskeletons embrace HRI as well as technological and theoretical challenges towards real and effective rehabilitation. In this realm, some questions arise, to name a few, what is the relationship between the exchanged energy between human and exoskeleton? How can we assess rehabilitation factors under HRI philosophy? This paper attempts to establish answers to these questions, which can be embodied into rehabilitation HRI using a Light-Exoskeleton. A compliant haptic guidance scheme for human arm subject to minimum-jerk-trajectories criterion is proposed. Preliminary experimental results provide further insight of a haptic guidance scheme taking into account decisive factors into the HRI such as human pose, haptic guidance control, reaching and tracking tasks, the complexity of the virtual environment, and muscles activity.
doi:10.1109/ROMAN.2009.5326057 Bibtex:
@inproceedings{lugo2009haptics,
author = {Lugo-Villeda, Luis Ivan and Frisoli, Antonio and Sandoval-Gonzalez, Oscar and Padilla, Miguel A and Parra-Vega, Vicente and Avizzano, Carlo Alberto and Ruffaldi, Emanuele and Bergamasco, Massimo},
booktitle = {Robot and Human Interactive Communication, RO-MAN. The 18th IEEE International Symposium on},
doi = {10.1109/ROMAN.2009.5326057},
keyword = {star:,exos,pid:CP9.9,scopus:yes,haptics,pdf:2009_C_ROMANhaptics,SKILLS.ScopusEID:2-s2.0-72849107543,scopus:yes},
organization = {IEEE},
pages = {903--908},
title = {Haptic guidance of light-exoskeleton for arm-rehabilitation tasks},
year = {2009}
}
| |
|
| Integration of multimodal technologies for a rowing platform
Ruffaldi Emanuele, Sandoval-gonzalez Oscar Osvaldo, Filippeschi Alessandro, Tripicchio Paolo, Frisoli Antonio, Avizzano Carlo Alberto & Bergamasco Massimo
Mechatronics, ICM. The IEEE International Conference on (pp. 1-6). ,2009 Cite Details... | Abstract:This paper presents the integration of multimodal technologies to measure and transmit different variables and stimuli involved in the human motion analysis, both for the training and for the transfer of users skills achieved by means of a mechatronic rowing platform. Although the mechanical design is the core of this project, this paper describes the integration and interaction of two multimodal systems (the human being and the rowing platform). These systems works together using different sensors and methodologies directly integrated to the human body to obtain detailed information related to the synchronization and correlation among the trajectories, proximal distance coupling, velocities, muscular activation and muscular force, transversal force in the oars and head position acquired through digital image processing and machine learning techniques. This information is evaluated and used in the rendering section through audio-tactile stimuli for the acceleration learning process.
doi:10.1109/ICMECH.2009.4957238 Bibtex:
@inproceedings{ ruffaldi2009integration, author = {Ruffaldi, Emanuele and Sandoval-Gonzalez, Oscar and Filippeschi, Alessandro and Tripicchio, Paolo and Frisoli, Antonio and Avizzano, Carlo and Bergamasco, Massimo}, booktitle = {Mechatronics, ICM. The IEEE International Conference on}, doi = {10.1109/ICMECH.2009.4957238}, keyword = {rowing,pid:CP9.6,scopus:yes,haptics,pdf:2009_C_INTrow,SKILLS}, organization = {IEEE}, pages = {1--6}, title = {Integration of multimodal technologies for a rowing platform}, year = {2009} }
| |
|
| Vibrotactile perception assessment for a rowing training system
Ruffaldi Emanuele, Filippeschi Alessandro, Frisoli Antonio, Sandoval O., Avizzano Carlo Alberto & Bergamasco Massimo
World Haptics Conference IEEE (pp. 350-355). ,2009 Cite Details... | Abstract:This paper presents a vibrotactile methodology for a rowing training system. Since hands' trajectories are fundamental in the rowing gesture, it is completely necessary to search and develop new technologies and techniques that can interact and help the user to perform a better movement. These methodologies must be as natural as possible in order to guarantee the transparency in the feedback of the system. Therefore this paper presents an analysis of visual, visual-tactile and tactile training strategies to understand the importance in the order and the period of time when each one is applied. Data analysis shows the importance of combining visual and tactile feedbacks to obtain the best results in the improvements of the user skills.
doi:10.1109/WHC.2009.4810849 Bibtex:
@inproceedings{ ruffaldi2009vibrotactile, author = {Ruffaldi, E. and Filippeschi, A. and Frisoli, A. and Sandoval, O. and Avizzano, C.A. and Bergamasco, M.}, booktitle = {World Haptics Conference IEEE}, doi = {10.1109/WHC.2009.4810849}, keyword = {rowing,haptic interfaces;haptic;data analysis;rowing gesture;rowing training system;tactile training strategies;user skills;vibrotactile perception assessment;visual-tactile;Cities and towns;Data analysis;Feedback;Haptic interfaces;Humans;Skin;Teleoperators;Tendons;Vibrations;Virtual environment;H.5.2 [User interfaces]: Training, help, and documentation;I.2.6 [Learning]: Knowledge acquisition,pid:CP9.5,scopus:yes,pdf:2009_C_Vibrotactile_301400,SKILLS}, month = {March}, organization = {IEEE}, pages = {350-355}, title = {Vibrotactile perception assessment for a rowing training system}, year = {2009} }
| |
|
| Control strategies and perception effects in co-located and large workspace dynamical encountered haptics
Tripicchio Paolo, Ruffaldi Emanuele, Avizzano Carlo Alberto & Bergamasco Massimo
World Haptics Conference (WHC). IEEE (pp. 63-68). ,2009 Cite Details... | Abstract:The present work focuses on perceptual control of haptic manipulation during high frequency interaction with mobile objects. In particular in this work we focused on the analysis of the control and perceptual issues in the throwing and catching in . A training multimodal system that exploits the concepts of co-located visuo-haptic feedback and encountered interfaces was implemented. Using such a system the user juggles with a number of virtual balls that are in contact with him from catch to throw. The control design of the system has been supported by a psychometric validation of the catch contact.
doi:10.1109/WHC.2009.4810838 Bibtex:
@inproceedings{ tripicchio2009control, author = {Tripicchio, Paolo and Ruffaldi, Emanuele and Avizzano, Carlo Alberto and Bergamasco, Massimo}, booktitle = {World Haptics Conference (WHC). IEEE}, doi = {10.1109/WHC.2009.4810838}, keyword = {pid:CP9.4,haptics,minor:,scopus:yes,pdf:2009_C_WHCjug_5426,GRAB}, organization = {IEEE}, pages = {63--68}, title = {Control strategies and perception effects in co-located and large workspace dynamical encountered haptics}, year = {2009} }
| |
|
| Recognition of hand gestures tracked by a dataglove: Exploiting Hidden Markov Models discriminative training and environment description to improve recognition performance
Lippi Vittorio, Ruffaldi Emanuele, Avizzano Carlo Alberto & Bergamasco Massimo
Artificial Neural Networks and Intelligent Information Processing - Proc. 5th Int. Workshop on Artificial Neural Networks and Intelligent Information Processing - ANNIIP 2009, held with ICINCO 2009 (pp. 33-42). ,2009 Cite Details... | Abstract:Sequence classification based on Hidden Markov Models (HMMs) is widely employed in gesture recognition. Usually, HMMs are trained to recognize sequences by adapting their parameters through the Baum-Welch algorithm, based on Maximum Likelihood (ML). Several articles have pointed out that ML can lead to poor discriminative performances among gestures. This happens because ML is not optimal for this purpose until the modellized process is actually an HMM. In this paper we present a gesture recognition system featuring a discriminative training algorithm based on Maximal Mutual Information (MMI) and the integration of environment information. The environment is described through a set of fuzzy clauses, on the basis of which a priori probabilities are computed. Adaptive systems such as unsupervised neural networks are used to build a codebook of symbols representing the hands states. An experiment on a set of meaningful gestures performed during the interaction with a virtual environment is then used to evaluate the performance of this solution.
doi:10.5220/0002206800330042 Bibtex:
@inproceedings{ Lippi200933, author = {Lippi, V. and Ruffaldi, E. and Avizzano, C.A. and Bergamasco, M.}, booktitle = {Artificial Neural Networks and Intelligent Information Processing - Proc. 5th Int. Workshop on Artificial Neural Networks and Intelligent Information Processing - ANNIIP 2009, held with ICINCO 2009}, documenttype = {Conference Paper}, doi = {10.5220/0002206800330042}, keyword = {pid:CP9.7,scopus:yes,ScopusEID:2-s2.0-74549214350,pdf:2009_C_ICINCOLippi}, pages = {33-42}, source = {Scopus}, title = {Recognition of hand gestures tracked by a dataglove: Exploiting Hidden Markov Models discriminative training and environment description to improve recognition performance}, year = {2009} }
| |
|
| Human forces in hands free interaction: a new paradigm for immersive virtual environments
Tripicchio Paolo, Sandoval-gonzalez Oscar Osvaldo, Filippeschi Alessandro, Ruffaldi Emanuele, Avizzano Carlo Alberto & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 18th IEEE International Symposium on (pp. 1179-1185). ,2009 Cite Details... | Abstract:A recent trend in virtual environments aims at making the user free of devices or limitations in its motion, at the benefit of immersiveness and interactivity. This work introduces an interaction paradigm that goes beyond motion based interaction, by making use of measured real forces exerted by the user in free space. The sensation of touch with virtual object is obtained by vibrotactile stimulation combining virtual contact information with measured forces. In this way the user has an additional dimension of interactivity at the benefit of immersivity, without incurring in the reduction of sense of presence introduced by grounded haptic interfaces. This paradigm is presented and discussed in particular in the context of a boxing training simulation, as one of the possible application scenarios.
doi:10.1109/ROMAN.2009.5326318 Bibtex:
@inproceedings{ tripicchio2009human, author = {Tripicchio, Paolo and Sandoval-Gonzalez, Oscar and Filippeschi, Alessandro and Ruffaldi, Emanuele and Avizzano, Carlo Alberto and Bergamasco, Massimo}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 18th IEEE International Symposium on}, doi = {10.1109/ROMAN.2009.5326318}, keyword = {pid:CP9.2,haptics,scopus:yes,pdf:2009_C_ROMANhands}, organization = {IEEE}, pages = {1179--1185}, title = {Human forces in hands free interaction: a new paradigm for immersive virtual environments}, year = {2009} }
| |
|
| Design of information landscapes for cultural heritage content
Ruffaldi Emanuele, Evangelista Chiara, Neri Veronica, Carrozzino Marcello & Bergamasco Massimo
Proceedings of the 3rd international conference on Digital Interactive Media in Entertainment and Arts ACM (pp. 113-119). ,2008 -- Cite this for our research on Information Landscapes Cite Details... | Abstract:The presentation of cultural heritage information is typically addressed with the use of web pages eventually integrated with specific visualization of 3d models that complete the textual information. The problem with this type of information is its extent, its complexity and the connection between the various concepts. This paper presents an Information Landscape system for the fruition of this type of information through a virtual environment, available both for desktop and immersive visualizations.
doi:10.1145/1413634.1413659 Bibtex:
@inproceedings{ ruffaldi2008design, author = {Ruffaldi, Emanuele and Evangelista, Chiara and Neri, Veronica and Carrozzino, Marcello and Bergamasco, Massimo}, booktitle = {Proceedings of the 3rd international conference on Digital Interactive Media in Entertainment and Arts ACM}, doi = {10.1145/1413634.1413659}, keyword = {star:,VR,pid:CP8.11,scopus:yes,pdf:2008_C_IL_DIMEA08_nonprint,ScopusEID:2-s2.0-62849097034,scopus:yes}, note = {Cite this for our research on Information Landscapes}, organization = {ACM}, pages = {113--119}, title = {Design of information landscapes for cultural heritage content}, video = {https://www.youtube.com/watch?v=IeO0dNPymXQ}, year = {2008} }
| |
|
| Patent based analysis of Technology Maps for Innovation Management and Research Planning
Sani Elisabetta, Ruffaldi Emanuele & Bergamasco Massimo
Towards new challenges for Innovative management practices N 2-Volume I (pp. 89-96). ,2008 Cite Details... Bibtex:
@inproceedings{ sani2patent, author = {Sani, E and Ruffaldi, E and Bergamasco, M}, booktitle = {Towards new challenges for Innovative management practices N 2-Volume I}, editor = {Jeremy Legardeur,Jorge Pinho de Sousa}, issn = {2100-0778}, keyword = {pid:CP8.10,patents,pdf:2008_C_ERIMA}, pages = {89-96}, title = {Patent based analysis of Technology Maps for Innovation Management and Research Planning} }
| |
|
| Virtual Laboratory: a virtual distributed platform to share and perform experiments
Tripicchio Paolo, Ruffaldi Emanuele, Avizzano Carlo Alberto & Bergamasco Massimo
Haptic interfaces for virtual environment and teleoperator systems, Haptics. Symposium on (pp. 311-318). ,2008 Cite Details... doi:10.1109/HAPTICS.2008.4479963 Bibtex:
@inproceedings{ tripicchio2008virtual, author = {Tripicchio, Paolo and Ruffaldi, Emanuele and Avizzano, Carlo Alberto and Bergamasco, Massimo}, booktitle = {Haptic interfaces for virtual environment and teleoperator systems, Haptics. Symposium on}, doi = {10.1109/HAPTICS.2008.4479963}, keyword = {pid:CP8.8,scopus:yes,haptics,pdf:2008_C_VirtualLab}, organization = {IEEE}, pages = {311--318}, title = {Virtual Laboratory: a virtual distributed platform to share and perform experiments}, year = {2008} }
| |
|
| Surface perception in a large workspace encounter interface
Ruffaldi Emanuele, Avizzano Carlo Alberto, Tripicchio Paolo, Frisoli Antonio & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 17th IEEE International Symposium on (pp. 21-26). ,2008 Cite Details... doi:10.1109/ROMAN.2008.4600637 Bibtex:
@inproceedings{ ruffaldi2008surface, author = {Ruffaldi, Emanuele and Avizzano, Carlo Alberto and Tripicchio, Paolo and Frisoli, Antonio and Bergamasco, Massimo}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 17th IEEE International Symposium on}, doi = {10.1109/ROMAN.2008.4600637}, keyword = {pid:CP8.7,scopus:yes,haptics,pdf:2008_C_ROMANlarge,GRAB}, organization = {IEEE}, pages = {21--26}, title = {Surface perception in a large workspace encounter interface}, year = {2008} }
| |
|
| Real-Time Gesture Recognition, Evaluation and Feed-Forward Correction of a Multimodal Tai-Chi Platform
Portillo-Rodriguez Otniel, Sandoval-gonzalez Oscar Osvaldo, Ruffaldi Emanuele, Leonardi Rosario, Avizzano Carlo Alberto & Bergamasco Massimo
Haptic and Audio Interaction Design (HAID 2008) (pp. 30-39). Springer Berlin Heidelberg,2008 Cite Details... | Abstract:This paper presents a multimodal system capable to understand and correct in real-time the movements of Tai-Chi students through the integration of audio-visual-tactile technologies. This platform acts like a virtual teacher that transfers the knowledge of five Tai-Chi movements using feed-back stimuli to compensate the errors committed by a user during the performance of the gesture. The fundamental components of this multimodal interface are the gesture recognition system (using k-means clustering, Probabilistic Neural Networks (PNN) and Finite State Machines (FSM)) and the real-time descriptor of motion which is used to compute and qualify the actual movements performed by the student respect to the movements performed by the master, obtaining several feedbacks and compensating this movement in real-time varying audio-visualtactile parameters of different devices. The experiments of this multimodal platform have confirmed that the quality of the movements performed by the students is improved significantly.
doi:10.1007/978-3-540-87883-4_4 Bibtex:
@inproceedings{ portillo2008real, author = {Portillo-Rodriguez, Otniel and Sandoval-Gonzalez, OscarO. and Ruffaldi, Emanuele and Leonardi, Rosario and Avizzano, CarloAlberto and Bergamasco, Massimo}, booktitle = {Haptic and Audio Interaction Design (HAID 2008)}, doi = {10.1007/978-3-540-87883-4_4}, editor = {Pirhonen, Antti and Brewster, Stephen}, isbn = {978-3-540-87882-7}, keyword = {star:,ML,Multimodal Interfaces; real-time 3D time-independent gesture recognition; real-time descriptor; vibrotactile feedback; audio-position feedback; Virtual Realty and Skills transfer,pid:CP8.6,pdf:2008_C_TAICHI}, language = {English}, pages = {30-39}, publisher = {Springer Berlin Heidelberg}, series = {Lecture Notes in Computer Science}, title = {Real-Time Gesture Recognition, Evaluation and Feed-Forward Correction of a Multimodal Tai-Chi Platform}, volume = {5270}, year = {2008} }
| |
|
| Development of a 3D real time gesture recognition methodology for virtual environment control
Portillo-Rodriguez Otniel, Sandoval-gonzalez Oscar Osvaldo, Avizzano Carlo Alberto, Ruffaldi Emanuele, Vercelli Davide & Bergamasco Massimo
Robot and Human Interactive Communication, RO-MAN. The 17th IEEE International Symposium on (pp. 279-284). IEEE,2008 Cite Details... doi:10.1109/ROMAN.2008.4600679 Bibtex:
@inproceedings{ portillo2008development, author = {Portillo-Rodriguez, Otniel and Sandoval-Gonzalez, Oscar Osvaldo and Avizzano, Carlo Alberto and Ruffaldi, Emanuele and Vercelli, Davide and Bergamasco, Massimo}, booktitle = {Robot and Human Interactive Communication, RO-MAN. The 17th IEEE International Symposium on}, doi = {10.1109/ROMAN.2008.4600679}, keyword = {pid:CP8.5,scopus:yes,pdf:2008_C_ROMANmotion}, pages = {279--284}, publisher = {IEEE}, title = {Development of a 3D real time gesture recognition methodology for virtual environment control}, year = {2008} }
| |
|
| Preliminary Design of Rowing Simulator for In-door Skill Training
Frisoli Antonio, Ruffaldi Emanuele, Bagnoli Leonardo, Filippeschi Alessandro, Avizzano Carlo Alberto, Vanni Federico & Bergamasco Massimo
Proceedings of the 2008 Ambi-Sys Workshop on Haptic User Interfaces in Ambient Media Systems (pp. 9:1-9:8). ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering),2008 Cite Details... doi:10.4108/ICST.AMBISYS2008.2911 Bibtex:
@inproceedings{ Frisoli:2008:PDR:1413907.1413916, acmid = {1413916}, address = {ICST, Brussels, Belgium, Belgium}, articleno = {9}, author = {Frisoli, Antonio and Ruffaldi, Emanuele and Bagnoli, Leonardo and Filippeschi, Alessandro and Avizzano, Carlo Alberto and Vanni, Federico and Bergamasco, Massimo}, booktitle = {Proceedings of the 2008 Ambi-Sys Workshop on Haptic User Interfaces in Ambient Media Systems}, doi = {10.4108/ICST.AMBISYS2008.2911}, keyword = {haptics, rowing simulator, skill transfer,pid:CP8.3,haptics,pdf:2008_C_AMBISYSrow.pdf,SKILLS}, location = {Quebec City, Canada}, numpages = {8}, pages = {9:1--9:8}, publisher = {ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering)}, series = {HAS '08}, title = {Preliminary Design of Rowing Simulator for In-door Skill Training}, year = {2008} }
| |
|
| Voxel-Based Haptic Rendering Using Implicit Sphere Trees
Ruffaldi Emanuele, Morris Dan, Barbagli Federico, Salisbury Ken & Bergamasco Massimo
Haptic interfaces for virtual environment and teleoperator systems, 2008. haptics 2008. symposium on (pp. 319-325). ,2008 Cite Details... doi:10.1109/HAPTICS.2008.4479964 Bibtex:
@inproceedings{ ruffaldi2008voxel, author = {Ruffaldi, E. and Morris, D. and Barbagli, F. and Salisbury, K. and Bergamasco, M.}, booktitle = {Haptic interfaces for virtual environment and teleoperator systems, 2008. haptics 2008. symposium on}, doi = {10.1109/HAPTICS.2008.4479964}, keyword = {haptic interfaces;haptic;rendering (computer graphics);solid modelling;tree data structures;virtual reality;collision detection;data structure;haptic interaction;implicit sphere trees;realistic environment;virtual objects;volumetric object representation;voxel-based haptic rendering;Computational efficiency;Computer graphics;Context modeling;Data structures;Haptic interfaces;Rendering (computer graphics);Solid modeling;Testing;Tree data structures;Virtual environment;H.5.2 [Information Interfaces and Presentation]: User Interfaces Haptic I/O;I.3.5 [Computer Graphics]: Computational Geometry and Object Modeling Geometric algorithms, languages, and systems;collision detection;haptics;volumetric models,pid:CP8.9,scopus:yes,pdf:2008_C_Voxel_301304}, month = {March}, pages = {319-325}, title = {Voxel-Based Haptic Rendering Using Implicit Sphere Trees}, year = {2008} }
| |
|
| Designing an Enactive Interface for Virtual Prototyping: a Case Study
Boeck JoanDe, Ruffaldi Emanuele, Carrozzino Marcello, Raymaekers Chris, Coninx Karin & Bergamasco Massimo
4th International Conference on Enactive Interfaces (pp. 77-80). ,2007 Cite Details... | Abstract:It may sound obvious that computer interfaces strive to adopt the same patterns of learning as we know from our daily world. In particular we refer to the enactive knowledge, acquired by doing, such as driving a car, or playing an instrument. However, even in highly interactive 3D virtual environment applications, the implementation of these enactive interfaces, is still not common. This paper shows how the adoptation of a hardware, and the use of high level interaction diagram may support the easier creation of such an interface.
Bibtex:
@inproceedings{ boeck07, author = {Joan De Boeck and Emanuele Ruffaldi and Marcello Carrozzino and Chris Raymaekers and Karin Coninx and Massimo Bergamasco}, booktitle = {4th International Conference on Enactive Interfaces}, howpresented = {poster}, issn = {1958-5497}, keyword = {virtual prototyping,haptics,enactive,pid:CP7.6,pdf:2007_C_Enactive07VR}, month = {November}, pages = {77--80}, title = {Designing an Enactive Interface for Virtual Prototyping: a Case Study}, year = {2007} }
| |
|
| Business Model for Enactive Interfaces
Sani Elisabetta, Ruffaldi Emanuele, Faste Hakoon & Bergamasco Massimo
Proceedings of ENACTIVE/07. 4th International Conference on Enactive Interfaces (pp. 251-254). Acroe,2007 Cite Details... Bibtex:
@inproceedings{ sani07, author = {Elisabetta Sani and Emanuele Ruffaldi and Hakoon Faste and Massimo Bergamasco}, booktitle = {Proceedings of ENACTIVE/07. 4th International Conference on Enactive Interfaces}, issn = {1958-5497}, keyword = {business model,ENACTIVE,patents,pid:CP7.5,pdf:2007_C_Enactive07Bu}, month = {November}, owner = {skills}, pages = {251--254}, publisher = {Acroe}, timestamp = {2006.12.28}, title = {Business Model for Enactive Interfaces}, year = {2007} }
| |
|
| |
| A Limit-Curve Based Soft Finger god-object Algorithm
Frisoli Antonio, Barbagli Federico, Ruffaldi Emanuele, Bergamasco Massimo & Salisbury Ken
Haptic Interfaces for Virtual Environment and Teleoperator Systems. The 14th IEEE Symposium on ,2006 Cite Details... | Abstract:This paper presents a new soft-finger haptic rendering algorithm based on the concept of limit curve which was previously used by the robotic manipulation community to study sliding contacts. The algorithm is more general than the one presented by the same authors in a previous paper since it considers the effects of linear and rotational friction as coupled. However, the solution presented in this paper maintains some of the aspects of simplicity and compu tational efficiency that characterized the previously proposed solution. To conclude the paper we present a set of simulated interactions between a user and a simple virtual object through a haptic device which allows two point-contact interaction.
doi:10.1109/HAPTIC.2006.1627064 Bibtex:
@inproceedings{ limitcurve06, author = {Antonio Frisoli and Federico Barbagli and Emanuele Ruffaldi and Massimo Bergamasco and Ken Salisbury}, booktitle = {Haptic Interfaces for Virtual Environment and Teleoperator Systems. The 14th IEEE Symposium on}, doi = {10.1109/HAPTIC.2006.1627064}, keyword = {star:,friction,grasping,rotational,haptics,pid:CP6.2,scopus:yes,GRAB,pdf:2006_C_LimitCurve_300321}, owner = {skills}, timestamp = {2006.12.28}, title = {A Limit-Curve Based Soft Finger god-object Algorithm}, year = {2006} }
| |
|
| Standardized Evaluation of Haptic Rendering Systems
Ruffaldi Emanuele, Morris Dan, Edmunds T., Barbagli Federico & Pai Dinesh
Haptic Interfaces for Virtual Environment and Teleoperator Systems, 2006 14th Symposium on (pp. 225-232). ,2006 Cite Details... | Abstract:The development and evaluation of haptic rendering algorithms presents two unique challenges. Firstly, the haptic information channel is fundamentally bidirectional, so the output of a haptic environment is fundamentally dependent on user input, which is difficult to reliably reproduce. Additionally, it is difficult to compare haptic results to real-world, gold standard results, since such a comparison requires applying identical inputs to real and virtual objects and measuring the resulting forces, which requires hardware that is not widely available. We have addressed these challenges by building and releasing several sets of position and force information, collected by physically scanning a set of real-world objects, along with virtual models of those objects. We demonstrate novel applications of this data set for the development, debugging, optimization, evaluation, and comparison of haptic rendering algorithms.
doi:10.1109/HAPTIC.2006.1627081 Bibtex:
@inproceedings{ standardized06, author = {Ruffaldi, E. and Morris, D. and Edmunds, T. and Barbagli, F. and Pai, D.K.}, booktitle = {Haptic Interfaces for Virtual Environment and Teleoperator Systems, 2006 14th Symposium on}, codeurl = {https://www.techhouse.org/~dmorris/projects/haptic_data/}, doi = {10.1109/HAPTIC.2006.1627081}, keyword = {star:,evaluation;ground truth;haptics;Algorithm design and analysis;Chromium;Computer science;Debugging;Force measurement;Haptic interfaces;Hardware;Libraries;Rendering (computer graphics);User interfaces;evaluation;ground truth;haptics;pid:CP6.1,scopus:yes,pdf:2006_C_Standardized_301484}, month = {March}, pages = {225-232}, title = {Standardized Evaluation of Haptic Rendering Systems}, year = {2006} }
| |
|
| Fork-lift truck simulator for training in industrial environment
Bergamasco Massimo, Perotti S., Avizzano Carlo Alberto, Angerilli Micheal, Carrozzino Marcello & Ruffaldi Emanuele
Emerging Technologies and Factory Automation, ETFA. The 10th IEEE International Conference on ,2005 Cite Details... | Abstract:Since their first usage simulators have been employed in training staff in civil aeronautics and in military fields to improve driving skills without compromising safety of people and machines. The system proposed in this paper is suited to transfer this activity into the industrial field, in particular an innovative fork-lift simulator is presented. Actually most frequent causes of accident with fork-lifts are wrong manoeuvres accomplished by drivers. This simulator aims to improve skills in driving and handling materials using a fork-lift. The system can reply inertial feedback on the operator and allows the user to control all the tasks of a fork-lift as driving and handling materials. The paper presents an overall view of the system including Stewart platform, supporting structure, physical based model, wash-out filter, system architecture and a video system mounted on board of the moving platform
doi:10.1109/ETFA.2005.1612593 Bibtex:
@inproceedings{ forklift05, author = {Bergamasco,M. and Perotti, S. and Avizzano,C.A. and Angerilli,M. and Carrozzino,M. and Ruffaldi,E.}, booktitle = {Emerging Technologies and Factory Automation, ETFA. The 10th IEEE International Conference on}, doi = {10.1109/ETFA.2005.1612593}, keyword = {simulator,INDICA,pid:CP5.3,pdf:2005_C_ETFAfork}, owner = {skills}, timestamp = {2006.12.29}, title = {Fork-lift truck simulator for training in industrial environment}, year = {2005} }
| |
|
| Explorative information spaces with the Virtual TeXt-o-Graphic Library
(VTEXGL)
Ruffaldi Emanuele & Bergamasco Massimo
VR International in HCI ,2005 Cite Details... Bibtex:
@inproceedings{ruffaldi05,
author = {Ruffaldi,E. and Bergamasco,M.},
booktitle = {VR International in HCI},
keyword = {information landscape,VR,IL,pid:CP5.1},
owner = {skills},
timestamp = {2006.12.29},
title = {Explorative information spaces with the Virtual TeXt-o-Graphic Library
(VTEXGL)},
year = {2005}
}
| |
|